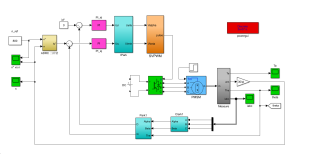
PMSM电机二阶速度环自抗扰控制,
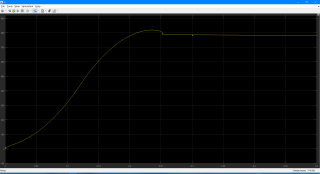
仿真结果中,电机转速和给定转速不跟随,实际转速达不到给定值。

PMSM电机二阶速度环自抗扰控制,
 分享
分享
 关注
关注在使用二阶速度环自抗扰控制(SDRE)算法进行PMSM电机控制时,如果电机转速和给定转速不跟随,实际转速达不到给定值,可能是以下原因导致的:
系统参数的不准确性:PMSM电机的参数包括电感、电阻、磁极数等,这些参数的不准确性会影响控制效果,需要进行精确的参数估计。
控制器参数的设计不合理:二阶速度环自抗扰控制的控制器参数包括比例系数、积分时间常数等,这些参数的选择需要经过仔细的设计和调试。
传感器测量误差:电机控制需要对电机状态进行反馈控制,如果传感器测量误差较大,会影响控制的准确性。
控制系统的稳定性问题:如果二阶速度环自抗扰控制的控制系统存在稳定性问题,会导致输出不稳定,进而影响电机转速。
解决以上问题可以尝试以下方法:
对电机参数进行准确的估算或测量,并根据实际情况进行调整。
重新设计控制器参数,进行模拟仿真和实验验证,确定最佳参数。
检查传感器的安装和连接是否正确,并进行校准。
对控制系统进行稳定性分析,并采取相应的措施解决问题,例如增加低通滤波器、降低系统带宽等。
另外,在进行电机控制时,需要注意控制器的鲁棒性和实时性。如果控制算法具有较好的鲁棒性和快速响应能力,可以更好地应对突发情况,提高控制精度和稳定性。
分享 创建了问题
5月29日
创建了问题
5月29日



