随机采样一致性 球模型 和 平面模型
分割平面 平面模型分割 基于随机采样一致性
圆柱体分割 依据法线信息分割 平面上按 圆柱体模型分割得到圆柱体点云
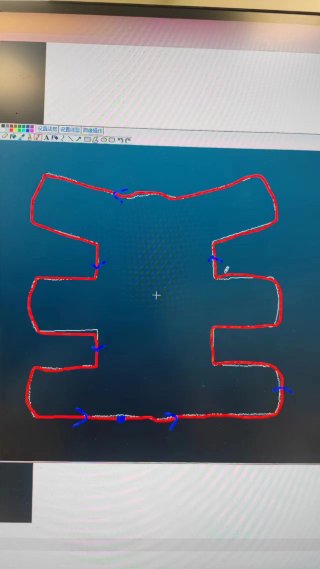
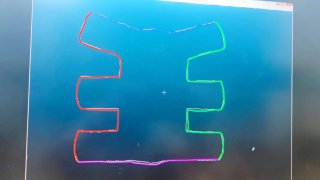
欧氏距离分割 平面模型分割平面 平面上按 聚类得到 多个点云团
基于 法线差值 和 曲率差值 的 区域聚类分割算法
基于颜色的 区域聚类分割算法 pcl::RegionGrowingRGB
PCL(Point Cloud Library)是一个常用的点云处理库,它提供了丰富的点云处理算法和工具。在PCL中,点云排序和分割也是常见的操作。
PCL点云排序可以使用pcl::PointCloud类中的sort函数进行实现,该函数可以按照点的坐标、距离等属性进行排序。例如,可以按照点到原点的距离进行排序:
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
// 加载点云数据
pcl::io::loadPCDFile<pcl::PointXYZ> ("cloud.pcd", *cloud);
// 按照点到原点的距离进行排序
std::sort(cloud->points.begin(), cloud->points.end(), [](const pcl::PointXYZ& a, const pcl::PointXYZ& b){
return std::sqrt(a.x*a.x + a.y*a.y + a.z*a.z) < std::sqrt(b.x*b.x + b.y*b.y + b.z*b.z);
});
PCL点云分割可以使用PCL中的各种分割算法进行实现,常见的分割算法包括基于平面模型的分割、基于聚类的分割等。例如,可以使用基于平面模型的分割算法将点云分割成平面和非平面两部分:
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
// 加载点云数据
pcl::io::loadPCDFile<pcl::PointXYZ> ("cloud.pcd", *cloud);
// 创建分割对象
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setMaxIterations (1000);
seg.setDistanceThreshold (0.01);
// 执行分割
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
seg.setInputCloud (cloud);
seg.segment (*inliers, *coefficients);
// 提取平面和非平面两部分点云
pcl::ExtractIndices<pcl::PointXYZ> extract;
pcl::PointCloud<pcl::PointXYZ>::Ptr plane_cloud (new pcl::PointCloud<pcl::PointXYZ>);
extract.setInputCloud (cloud);
extract.setIndices (inliers);
extract.setNegative (false);
extract.filter (*plane_cloud);
pcl::PointCloud<pcl::PointXYZ>::Ptr nonplane_cloud (new pcl::PointCloud<pcl::PointXYZ>);
extract.setNegative (true);
extract.filter (*nonplane_cloud);