
为了实现21年电赛送药小车的题目要求,给openmv和esp32 分别写了一段代码,但是现在openmv的代码一直报错提示无效语法,esp32的代码提示UART不存在。
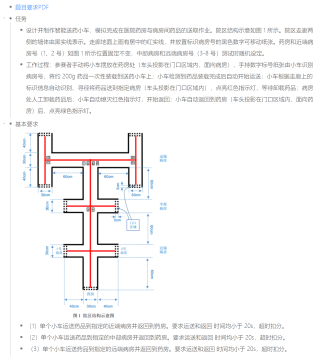
以下是21年送药小车的题(代码只实现基础要求):
esp32的代码:
from machine import Pin,PWM,ADC,SoftI2C
#from pid import PID
from ssd1306 import SSD1306_I2C
from machine import UART
import sensor, time, os
#引脚定义
#电机引脚
IN1=Pin(8,Pin.OUT) #右侧电机
IN2=Pin(9,Pin.OUT)
IN3=Pin(18,Pin.OUT) #左侧电机
IN4=Pin(10,Pin.OUT)
#开关引脚
KEY=Pin(0,Pin.IN,Pin.PULL_UP) #构建 KEY 对象
# IN1_pwm=PWM(IN1,duty=298)
# IN3_pwm=PWM(IN3,duty=280)
state = 0
#药品检测引脚
number_model = 0
# 应检测到的模板数字初始化为0
#初始化
i2c=SoftI2C(sda=Pin(42),scl=Pin(40))
oled=SSD1306_I2C(128,64,i2c,addr=0x3c)
uart_tx = UART(43, 9600)
uart_tx.init(9600, bits=8, parity=None, stop=1)
uart_rx = UART(44, 9600)
uart_rx.init(9600, bits=8, parity=None, stop=1)
def control(KEY):
global state
time.sleep_ms(10) #消除抖动
if KEY.value()==0: #确认按键被按下
state=not state #使用 not 语句而非~语句很抱歉B
IN1.value(state)
IN3.value(state)#LED 状态翻转
# IN1_pwm=PWM(IN1,duty=256)
# IN3_pwm=PWM(IN3,duty=256)
IN1.frep(600)
time.sleep(1)
#前进
def Go():
IN1_pwm=PWM(IN1,duty=298)
IN3_pwm=PWM(IN3,duty=280)
# IN1.value(1)
# IN3.value(1)
def left():#左转
IN1_pwm=PWM(IN3,duty=0)
IN3_pwm=PWM(IN4,duty=0)
time.sleep(0.5)
IN1_pwm=PWM(IN1,duty=298)
IN3_pwm=PWM(IN3,duty=280)
def right():#右转
IN1_pwm=PWM(IN1,duty=0)
IN3_pwm=PWM(IN2,duty=0)
IN1.value(1)
IN2.value(1)
time.sleep(0.5)
IN1_pwm=PWM(IN1,duty=298)
IN3_pwm=PWM(IN3,duty=280)
def led():#装好药品后红灯亮起,回到药房处绿灯亮起
# if 放药处避障模块给出信号(放上药品):
if barrier1() == 1:
led1.value(1)
if barrier1() == 2:
led1.value(0)
return
#if flag=1:
#led2.value(1)
#倒车,后退
def Back():
IN1.value(not state)
IN3.value(not state)
return 1
def stop():
IN1.value(0)
IN2.value(0)
IN3.value(0)
IN4.value(0)
# time.sleep(1)
def barrier():#返回药盒处的红外避障模块给出的0/1信号
barrier1=ADC(Pin(6))
# return barrier1.read()
#print(barrier1.read())
#time.sleep(1)
#print(barrier1.value())
if barrier1.read()<1000: #红外避障模块输出为1,已装载药品
# 装载药品后即开始检测数字
sensor.reset() # 复位和初始化传感器。
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
#sensor.set_framesize(sensor.VGA)
sensor.set_windowing((240, 240))
# Set 240x240 window.设置传感器的窗口大小
sensor.skip_frames(time=2000) # Let the camera adjust.
# 跳过一定时间内的图像帧
clock = time.clock()
while True:
clock.tick()
img = sensor.snapshot().binary([(0,64)])
for obj in tf.classify("trained.tflite", img, min_scale=1.0, scale_mul=0.9, x_overlap=0.0, y_overlap=0.0):
output = obj.output()
#print(output)
#print(max(output))
global number_model
number_model = output.index(max(output))
uart_tx.write(number_model)
Go()
oled.fill(0)
oled.text("The medication",0,20)
oled.text(" has ready!",0,30)
oled.show()
return 1
else:
stop()
oled.text("Please put in ",0,20)
oled.text("the medication!",0,30)
oled.show()
#可以不加在定时器,根据车行驶状态来给出调用此函数的位置
def main():
KEY.irq(control,Pin.IRQ_FALLING)
Barrier=Pin(47,Pin.OUT)
#Barrier.irq(AvoidingObstacles,Pin.IRQ_FALLING)
while True:
#Back()
barrier()
#flag = uart_rx.read(10)
uart_rx.readinto(flag)
if flag == 'left':
left()
elif flag == 'right':
right()
elif flag == 'Go':
Go()
elif flag == 'stop':
stop()
if __name__ == '__main__':
main()
openmv的代码:
THRESHOLD = (70, 4, 18, 127, -125, 127) # Grayscale threshold for dark things...
# 灰度阈值
from machine import Pin,PWM,ADC,SoftI2C
from pid import PID
from ssd1306 import SSD1306_I2C
import sensor, image, time, os, tfe
from pyb import UART
uart_rx = UART('P5',9600)
uart_rx.init(9600, bits=8, parity=None, stop=1)
uart_tx = UART('P4',9600)
uart_tx.init(9600, bits=8, parity=None, stop=1)
def motor():
rho_pid = PID(p=0.4, i=0)
theta_pid = PID(p=0.001, i=0)
sensor.reset()
sensor.set_vflip(True)
# 垂直翻转,从传感器获取的图像或数据在显示或处理时会上下颠倒。
sensor.set_hmirror(True)
# 将传感器的图像或数据在水平方向上进行镜像操作(从传感器获取的图像或数据在显示或处理时会左右翻转
sensor.set_pixformat(sensor.RGB565)
# 设置传感器像素格式
sensor.set_framesize(sensor.QQQVGA)
# 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000.
# 设置帧尺寸
sensor.skip_frames(time = 2000)
# WARNING: If you use QQVGA it may take seconds
# 使传感器跳过接下来的2000毫秒内的帧
clock = time.clock()
# to process a frame sometimes.
# 创建一个定时器对象
while(True):
clock.tick()
#number_model = uart_rx.read()
uart_rx.readinto(number_model)
# 获取自上次调用tick()方法以来的毫秒数,常用于实现帧率控制或时间延迟
img = sensor.snapshot().binary([THRESHOLD])
# 获取当前图像帧,然后对图像进行二值化处理
list_line = img.find_lines()
num = len(list_line)
if num == 2:
if number_model =1 :
#left()
uart_tx.write('left\n')
break
elif number_model = 2:
#right()
uart_tx.write('right\n')
break
line = img.get_regression([(100,100)], robust = True)
# 进行直线检测
if (line):
rho_err = abs(line.rho())-img.width()/2
if line.theta()>90:
theta_err = line.theta()-180
else:
theta_err = line.theta()
img.draw_line(line.line(), color = 127)
print(rho_err,line.magnitude(),rho_err)
if line.magnitude()>8:
#if -40<b_err<40 and -30<t_err<30:
rho_output = rho_pid.get_pid(rho_err,1)
theta_output = theta_pid.get_pid(theta_err,1)
output = rho_output+theta_output
#car.run(50+output, 50-output)
#right()
if 50+output>50-output:
#左快右慢,向右转
#right()
uart_tx.write('right\n')
break
elif 50+output<50-output:
#left()
uart_tx.write('left\n')
break
else:
#Go()
uart_tx.write('Go\n')
break
else:
#car.run(0,0)# 左右速度为0,停止
#stop()
uart_tx.write('stop\n')
break
else:
#car.run(50,-50)#向左转
#left()
uart_tx.write('left\n')
break
pass
#print(clock.fps())
# 此函数仅用于确保小车沿着红线走
def numfind(num_model):
sensor.reset() # 复位和初始化传感器。
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
#sensor.set_framesize(sensor.VGA)
sensor.set_windowing((240, 240))
# Set 240x240 window.设置传感器的窗口大小
sensor.skip_frames(time=2000) # Let the camera adjust.
# 跳过一定时间内的图像帧
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot().binary([(0,64)])
for obj in tf.classify("trained.tflite", img, min_scale=1.0, scale_mul=0.9, x_overlap=0.0, y_overlap=0.0):
output = obj.output()
#print(output)
#print(max(output))
number = output.index(max(output))
if number == num_model:
if number == 3:
#left()
uart_tx.write('left\n')
break
elif number==4:
#right()
uart_tx.write('right\n')
break
elif number==5 or number==7:
#left()
uart_tx.write('left\n')
while True:
clock.tick()
img = sensor.snapshot().binary([(0,64)])
for obj in tf.classify("trained.tflite", img, min_scale=1.0, scale_mul=0.9, x_overlap=0.0, y_overlap=0.0):
output = obj.output()
number = output.index(max(output))
if number ==5:
#right()
uart_tx.write('right\n')
break
elif number==7:
#left()
uart_tx.write('left\n')
break
elif number==6 or number==8:
#right()
uart_tx.write('right\n')
while True:
clock.tick()
img = sensor.snapshot().binary([(0,64)])
for obj in tf.classify("trained.tflite", img, min_scale=1.0, scale_mul=0.9, x_overlap=0.0, y_overlap=0.0):
output = obj.output()
number = output.index(max(output))
if number ==6:
#right()
uart_tx.write('right\n')
break
elif number==8:
#left()
uart_tx.write('left\n')
break
while True:
motor()
num_model = uart_rx.read(10)
numfind(num_model)






