关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
momo:_
2024-01-06 10:39
采纳率: 0%
浏览 10
首页
其他
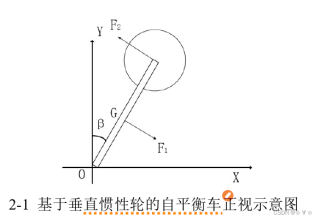
垂直惯性轮的自平衡车
其他
这个图片中的模型,是把实际模型(车轮在地)旋转了一下,然后把杆转到原点吗?
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
结题
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
爱编程的小芒果
2024-01-06 10:46
关注
应该是的哦
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
动量
轮
自
平衡
自行
车
嵌入式控制系统设计
2025-12-10 05:04
github5actions的博客
自
平衡
系统是典型的欠驱动非线性控制问题,其核心依赖角动量守恒原理实现姿态稳定。通过动量
轮
高速旋转产生可控陀螺力矩,抵消重力倾覆力矩,本质属于机电耦合的实时闭环控制技术。该方案具备高实时性(1ms控制周期...
matlab两
轮
自
平衡
小
车
,(2-3合刊) 基于MEMS
惯性
传感器的两
轮
自
平衡
小
车
设计
2021-04-18 16:12
温情主义者的博客
摘要:着重分析了两
轮
自
平衡
小
车
的设计原理与控制算法,采用卡尔曼滤波算法融合陀螺仪与加速度计信号,得到系统姿态倾角与角速度最优估计值,通过双闭环数字PID 算法实现系统的自
平衡
控制。设计了以MPU-6050传感器为...
51单片机两
轮
平衡
小
车
2016-10-26 08:56
《51单片机两
轮
平衡
小
车
:代码解析与技术要点详解》 在电子工程领域,51单片机以其简单易用、性价比高而备受青睐,而在各种智能小
车
设计中,两
轮
平衡
小
车
无疑是最具挑战性和趣味性的项目之一。本篇文章将深入探讨...
自
平衡
小
车
制作手册V1.1
2019-01-11 17:00
#### 两
轮
平衡
车
控制原理 ##### 1.1 两
轮
平衡
车
任务分解 两
轮
自
平衡
小
车
作为一种智能机器人平台,其核心在于通过精确控制实现
车
身的动态
平衡
。从控制系统角度来看,两
轮
自
平衡
小
车
的任务可以分为三个基本组成部分...
动量
轮
自
平衡
自行
车
的并级PID控制架构解析
2025-12-09 10:50
pz890123的博客
该技术具备高鲁棒性、低延迟响应和嵌入式友好等工程优势,广泛应用于两
轮
机器人、单
轮
车
及航天动量
轮
平台。在资源受限的MCU(如STM32)上,采用并级PID结构替代传统串级设计,可显著降低计算开销并提升控制带宽;...
动量
轮
自
平衡
自行
车
的角动量守恒原理与PID实现
2025-12-10 00:16
year5的博客
角动量守恒是刚体系统中维持旋转状态不变的基本物理定律,其核心在于合外力矩为零时,系统...本文聚焦动量
轮
自
平衡
自行
车
,详解其从角动量建模、IMU姿态解算到数字PID闭环控制的完整技术链,涵盖MPU6050数据融合、STM32
自
平衡
小
车
自
平衡
小
车
的原理硬件设计和源代码.zip
2019-08-25 11:35
(例如两
轮
平衡
机器人实际上是可以运动的,对于静止的磁悬浮来说,不需要考虑这个参数)这时候我们需要不断的累加并平均x值,来计算
平衡
位置的L,这个就是积分因子I; 当PID用在我们自
平衡
小
车
中时,我们使用角度PD...
Arduino UNO制作两
轮
平衡
车
具体实现
2025-08-14 16:32
Big_潘大师的博客
上述角度环PD实现后,小
车
平平后可以保持直立,但是若倾斜一定角度后则会沿着倾斜方向一直运动下去,因此需要增加速度环PI控制,使小
车
可以保持直立
平衡
。而世界上没有任何一个人可以蒙眼不看,就可以直立木棒的,...
从零开始的两
轮
自
平衡
车
制作指南
2025-04-27 09:30
半清斋的博客
电池作为自
平衡
车
的“心脏”,其性能直接影响到
车
辆的续航能力和可靠性。随着技术的不断进步,电池市场涌现出了许多新技术和新材料,为设备提供更长的续航和更好的性能。在本节中,我们将探讨不同类型的电池以及它们...
【花雕学编程】Arduino BLDC 之两
轮
自
平衡
车
(Segway类)
2025-11-07 04:54
驴友花雕的博客
摘要:Arduino BLDC两
轮
自
平衡
车
项目展示了如何通过状态反馈控制理论驾驭不稳定动态系统。该系统采用IMU传感器融合技术获取精确的俯仰角数据,结合PD控制算法实现实时
平衡
控制。关键点包括:1)使用互补/卡尔曼...
两
轮
自
平衡
小
车
硬件系统架构深度解析
2026-02-13 00:01
屁伦的博客
自
平衡
小
车
是典型的机电一体化实时控制系统,其核心依赖姿态感知与动力执行的闭环协同。原理上,通过IMU(如MPU-6050)获取角速度与加速度原始数据,结合互补滤波实现高精度倾角解算;再由MCU生成PWM信号,经H桥驱动...
32、自
平衡
电动两
轮
车
的设计与制造
2025-09-27 11:37
honey的博客
本文介绍了自
平衡
电动两
轮
车
的设计与制造,基于陀螺效应实现
车
辆的稳定性控制。通过合理设计质量分布和结构组件,利用旋转陀螺盘产生的反向力偶抵消外部干扰,提升两
轮
车
的安全性。文章详细阐述了结构组成、实验过程...
自动跟随
平衡
车
论文1
2022-08-03 12:16
《两
轮
平衡
车
的设计与制作》是一篇关于自动跟随
平衡
车
技术的论文,主要探讨了如何利用C语言和相关传感器技术实现两
轮
平衡
车
的稳定控制。本文将深入解析其中的关键知识点。 首先,C/C++等高级语言在控制系统设计中的...
两
轮
自
平衡
小
车
双闭环PID控制设计
2019-10-06 09:18
daxi0315的博客
两
轮
自
平衡
小
车
的研究意义 ...1.1两
轮
平衡
车
的研究意义 两
轮
平衡
车
是一种能够感知环境,并且能够进行分析判断然后进行行为控制的多功能的系统,是移动机器人的一种。在运动控制领域中,为了研究控制算法,建立两
轮
平...
动量
轮
自
平衡
原理:角动量守恒的嵌入式实现
2025-12-10 00:15
year5的博客
角动量守恒是刚体转动控制的基础物理定律,描述系统在合外力矩为零时...本文聚焦于基于STM32与MPU6050的动量
轮
自
平衡
自行
车
,深入剖析角动量守恒如何从经典力学第一性原理映射为实时闭环控制系统,涵盖传感器融合、PWM
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告
问题事件
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
创建了问题
1月6日

 分享
分享 创建了问题
1月6日
创建了问题
1月6日



