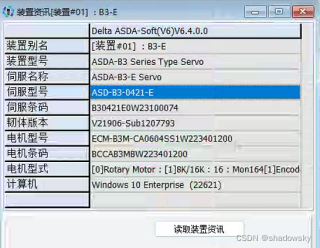
台达伺服 B3-0421-E (这个型号没有 Modbus)
连接方式 CN4:USB
问题:使用C# 如何读取参数写入参数(例如我想读取与写入 "P5.005" 参数 写入值为300 , 发送 JOG 寸动控制命令
(请不要用人工智能了我用了GPT4) 如果您觉得自己的方案正确 请添加 QQ 33512603 我提过远程桌面 用来测试


台达伺服 B3-0421-E (这个型号没有 Modbus)
连接方式 CN4:USB
问题:使用C# 如何读取参数写入参数(例如我想读取与写入 "P5.005" 参数 写入值为300 , 发送 JOG 寸动控制命令
(请不要用人工智能了我用了GPT4) 如果您觉得自己的方案正确 请添加 QQ 33512603 我提过远程桌面 用来测试
 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
要使用C#读取和写入参数以及发送控制命令到台达伺服 B3-0421-E,你可以使用以下步骤:
首先,确保你已经安装了Delta ASDA-Soft软件,并连接了台达伺服 B3-0421-E通过USB接口(CN4)。
在C#项目中,你需要使用串口通信来与伺服进行通信。你可以使用System.IO.Ports命名空间下的SerialPort类来实现串口通信。
以下是一个示例代码,用于读取和写入参数以及发送JOG寸动控制命令:
using System;
using System.IO.Ports;
public class DeltaServoController
{
private const string PortName = "COM4"; // 串口名称
private SerialPort serialPort;
public void Connect()
{
serialPort = new SerialPort(PortName, 9600, Parity.None, 8, StopBits.One);
serialPort.Open();
}
public void Disconnect()
{
serialPort.Close();
serialPort.Dispose();
}
public string ReadParameter(string parameterName)
{
// 构造读取参数的指令
string command = $"RPD {parameterName}";
// 发送指令到伺服
serialPort.WriteLine(command);
// 读取伺服返回的数据
string response = serialPort.ReadLine();
return response;
}
public void WriteParameter(string parameterName, string value)
{
// 构造写入参数的指令
string command = $"WPA {parameterName} {value}";
// 发送指令到伺服
serialPort.WriteLine(command);
// 等待伺服完成写入操作(可以根据需要自定义等待时间)
System.Threading.Thread.Sleep(1000);
}
public void SendJogControlCommand()
{
// 构造JOG寸动控制命令
string command = "JOG";
// 发送命令到伺服
serialPort.WriteLine(command);
}
}
你可以在需要的地方使用上述代码进行通信操作。首先调用Connect()方法连接到伺服,然后可以调用ReadParameter()方法来读取参数的值,或者调用WriteParameter()方法来写入参数的值。最后,调用SendJogControlCommand()方法来发送JOG寸动控制命令。
需要注意的是,上述代码中的串口名称为COM4,如果你的串口连接在其他端口,请根据实际情况进行修改。
希望这可以帮助你解决问题!如果需要进一步的帮助,请随时提问。
分享 已结题
(查看结题原因) 1月14日
修改了问题
1月14日
修改了问题
1月14日
创建了问题
1月14日
已结题
(查看结题原因) 1月14日
修改了问题
1月14日
修改了问题
1月14日
创建了问题
1月14日


