如何用STM32最小系统板控制该型号交流电压电机正反转?如何以最简单的方法实现其电路设计?

如何用STM32最小系统板控制该型号交流电压电机正反转?如何以最简单的方法实现其电路设计?
 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
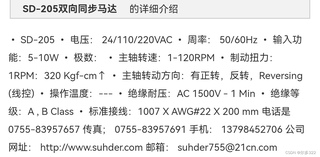
要实现交流电压电机正反转,特别是对于SD-205这款双向同步马达,通常不是通过STM32直接控制其交流输入来改变旋转方向的,因为这种类型的电机通常在交流电源线上没有内置电子换向功能。不过,可以通过使用固态继电器(SSR)或者接触器配合交流电源相序切换来控制它的正反转。
以下是基于STM32控制固态继电器进而改变交流电机正反转的一种方案:
graph LR;
STM32 -->|GPIO| SSR1[固态继电器1]
STM32 -->|GPIO| SSR2[固态继电器2]
SSR1 --> M[电机A相]
SSR2 --> M[电机B相]
220VAC --> SSR1
220VAC --> SSR2
// 假设PB6和PB7用于控制SSR1和SSR2
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 正转函数
void Motor_Forward(void) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); // SSR1闭合
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET); // SSR2断开
}
// 反转函数
void Motor_Reverse(void) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET); // SSR1断开
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET); // SSR2闭合
}
注意:实际应用时务必确保固态继电器能够承受电机的工作电流,并且正确处理好电气安全隔离问题,避免触电或短路风险。此外,针对具体的SD-205电机型号,建议查阅其详细规格书确认是否支持相序切换实现正反转。
分享 已结题
(查看结题原因) 3月13日
创建了问题
3月10日
已结题
(查看结题原因) 3月13日
创建了问题
3月10日


