
我想做一个电子桌牌,功能如下:1,用一台电脑可以控制多个桌牌,2单片机之间属于一主一从,主机可以控制从机,3,桌牌具有统计票数的功能,我应该怎么实现?(使用stm32f103c8t6系统板)


3条回答 默认 最新

 关注
关注【相关推荐】
- 你可以参考下这个问题的回答, 看看是否对你有帮助, 链接: https://ask.csdn.net/questions/7484509
- 我还给你找了一篇非常好的博客,你可以看看是否有帮助,链接:STM32学习(10)-定时器描述,三种计数方式,定时器的工作框图,定时器时钟来源,定时器相关寄存器和函数,通用定时器实现定时的步骤
- 除此之外, 这篇博客: 基于STM32F103C8T6的循迹避障小车完整制作过程(详细)----上篇(第123点)中的 2,如何写程序使小车前进后退和转弯呢? 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
设计思路就是设置4个IO口的高低电平
我的IO口与电机驱动是这样连接的:A1–IN1;A2–IN2;A3–IN3;A4–IN4;
再看下面这个代码,我简单的写了一个前进和一个左转函数void car_go(void); void car_left(void); int main(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能GPIO的外设时钟 GPIO_InitStructure.GPIO_Pin =GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;//选择要用的GPIO引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置引脚模式为推免输出模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置引脚速度为50MHZ GPIO_Init(GPIOA,&GPIO_InitStructure);//调用库函数,初始化GPIO car_go();//前进 } void car_go(void) //前进 { GPIO_SetBits(GPIOA,GPIO_Pin_1); //控制左边轮胎 GPIO_ResetBits(GPIOA,GPIO_Pin_2); GPIO_SetBits(GPIOA,GPIO_Pin_3); //控制右边轮胎 GPIO_ResetBits(GPIOA,GPIO_Pin_4); } void car_left(void) //左转 { GPIO_SetBits(GPIOA,GPIO_Pin_1); //控制左边轮胎 GPIO_ResetBits(GPIOA,GPIO_Pin_2); GPIO_ResetBits(GPIOA,GPIO_Pin_3); //控制右边轮胎 GPIO_SetBits(GPIOA,GPIO_Pin_4); }由于主函数里调用的是car_go函数,这个代码编译下载后车子就会向前走,如果你的轮子转反了的话,简单的方法就是把电机的正负极换个位置接就行了。
好了,这篇文章已经很长了,今天就先码到这里,整个完整过程会分为上中下三篇,剩下两篇过两天慢慢码完再发。
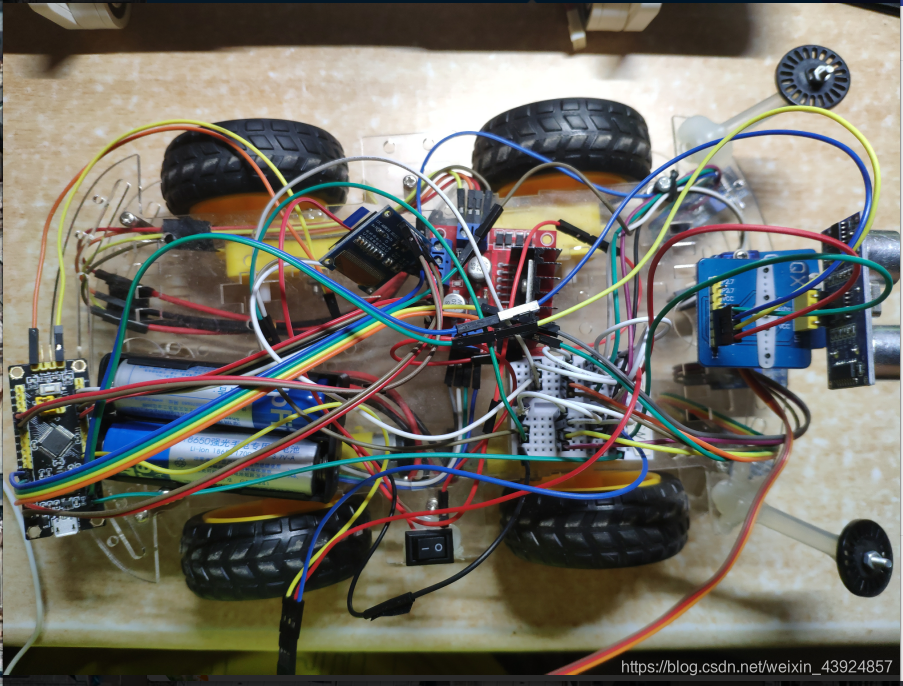
下面是我所制作的小车成品图,因为模块都是独立的,所以线比较多。
下面是我写的已经测试完成了的工程,主函数里有两个循环,分别是循迹和避障循环,他们是单独工作的,引用掉一个再打开另一个就行。
https://download.csdn.net/download/weixin_43924857/11650617
当然循迹和避障的策略都是我自己为了完成任务写的,比较简单,能够实现循迹避障功能,到后面你已经会操作各个模块后,自己写个更好的循迹避障策略是完全没有问题的,或者是用我的工程,里面的各模块函数也都写好了,直接调用就行。下面是中篇地址:
基于STM32F103C8T6的循迹避障小车完整制作过程(详细)----中篇(第456点)工程文件已经放到百度网盘:
链接:https://pan.baidu.com/s/1VSRC418Tz8uLCF8cjrIY1g
提取码:7m9y
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^解决 无用评论 打赏举报 分享
分享
- 2025-06-21 08:52本项目资料集中于利用STM32单片机实现一个智能家用电热水器控制器的设计与开发。STM32单片机,作为STMicroelectronics(意法半导体)推出的一款高性能的32位ARM Cortex-M微控制器,因其丰富的外设资源、高性能的处理...
- 2025-06-21 08:42在当今电子与自动控制领域,基于USB接口的温度控制器设计是一个引人注目的项目,其应用广泛,涵盖了工业控制、家用电器、环境监控等多个领域。本套资料聚焦于使用STM32单片机来设计这样一个温度控制器。STM32系列...
- 2020-07-23 10:04例如,在智能家居系统中,一个单片机可以作为控制器,连接各种传感器和执行机构,通过编程实现对家居环境的智能化控制。 #### 五、总结 单片机和嵌入式系统虽然有一定的联系,但在概念和应用上存在明显区别。...
- 2025-10-14 19:26云知谷的博客 阶段内容目的1C语言基础掌握编程语言核心,为单片机开发打基础2单片机原理入门了解单片机是什么、有什么、怎么用351单片机实战入门级实操,简单易学,快速上手4STM32开发(推荐)主流32位单片机,功能强大,职业发展...
- 2023-10-08 09:27同时,为了方便用户使用,可以设计一个简单易用的图形界面,实现远程控制和监控功能。 四、未来发展方向 随着科技的不断进步和应用需求的不断增长,基于单片机的嵌入式系统将会有更多的发展机遇和挑战。未来,...
- 2025-06-20 09:44华清远见成都中心的博客 单片机嵌入式 :通常用于对实时性要求高、资源需求较低的场合,如家电控制、工业自动化、小型机器人等。特点:小巧、可定制性、开放源代码、良好的兼容性、强大的网络支持、多任务支持、丰富的软件生态系统。特点:...
- 2025-06-22 09:33【单片机-嵌入式-stm32项目资料】线路通断测试器汇集了电路设计、嵌入式编程、测试算法开发以及用户界面设计等多个技术领域。通过本压缩包提供的资料,可以深入理解STM32单片机在实现线路通断测试器方面的应用,学习...
- 2025-09-08 16:43小猫Wook的博客 实践:做一个 串口收发调试器、PWM 控制呼吸灯、I2C OLED 显示屏驱动。 高阶阶段(MCU 应用与优化) 学习 Cortex-M3/M4 DSP 指令(滤波算法、FFT 应用)。 学习 低功耗设计(睡眠模式、时钟管理)。 学习 ...
- 2025-06-22 09:33此外,电子琴项目对于初学者来说是一个很好的实践案例,它不仅能够帮助他们理解嵌入式系统的基本概念,还能够加深对单片机工作原理和实际应用的认识。对于有经验的开发者而言,这样的项目也可以作为一个创新平台,...
- 2020-08-14 13:13标题中的“我与单片机和嵌入式系统20年”讲述的是一位专业人士与单片机和嵌入式系统长达二十年的互动经历,而描述则提到希望分享这段经历能对后来者有所帮助,特别是对于那些关注职场创业和职业规划的人。...
- 没有解决我的问题, 去提问


问题事件
 创建了问题
3月12日
创建了问题
3月12日