你好,我想请教一下,我是在adams在导入柔性体之后,调整柔性体的位置,这就导致各个柔性体的坐标系位置发生了改变,导致我在添加接触的时候这个接触漫天飞舞,我想请教一下,有没有办法可以在柔性体不动的情况下,让各个体的坐标系在一个位置,变成图3的样子
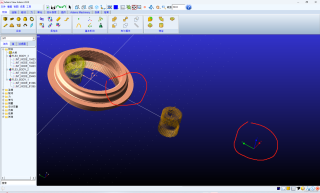
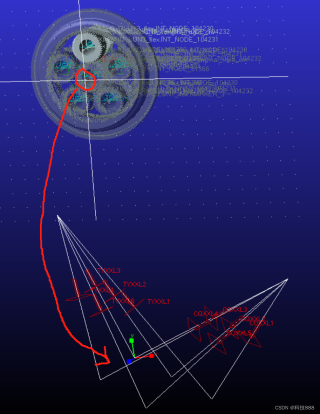
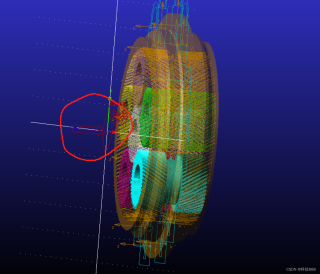
你好,我想请教一下,我是在adams在导入柔性体之后,调整柔性体的位置,这就导致各个柔性体的坐标系位置发生了改变,导致我在添加接触的时候这个接触漫天飞舞,我想请教一下,有没有办法可以在柔性体不动的情况下,让各个体的坐标系在一个位置,变成图3的样子
 分享
分享
 关注
关注让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言问题描述:柔性体位置调整后导致接触位置变化,如何让各个柔性体坐标系在一个位置? 解决方法:通过修改坐标系变换来实现。 具体步骤: 1.选择柔性体,打开"柔体子组件"窗口,找到对应节点的"杆件",并记录其"初始位置"。 2.在"柔体子组件"窗口中打开"节点",“选择对应的节点”。 3.打开"齿轮"窗口,在"变换"选项中,修改"第一级坐标系"的位置,使其与记录的“初始位置”重合。 4.确定修改后的齿轮位置正确之后,对其他柔性体重复上述步骤,将各个柔性体的坐标系位置重合。 代码案例: 在ADAMS中,可以通过以下Python脚本来实现自动重合各个柔性体的坐标系位置。
from adams_modules.script import *
flex_body_names = ["Body1", "Body2", "Body3"] # 柔性体名称列表
for body_name in flex_body_names: # 对每个柔性体
id = flex_get_object_by_name(body_name) # 获取柔性体对象ID
node_names = flex_get_node_names(id) # 获取柔性体节点名称列表
for node_name in node_names: # 对每个柔性体节点
node_id = flex_get_object_by_name(node_name) # 获取柔性体节点对象ID
gear_id = flex_get_gear_by_node(node_id, 0) # 获取柔性体节点所在齿轮对象ID
gear_tf = gear_get_transform(gear_id) # 获取齿轮初始变换
node_tf = flex_get_transform(id, node_id) # 获取节点初始变换
tf_local = transform_inverse(node_tf) # 求节点变换的逆变换
tf_local = transform_multiply(tf_local, gear_tf) # 逆变换与齿轮变换相乘,得到新的“相对齿轮”的变换
gear_set_transform(gear_id, tf_local) # 设置齿轮变换



