线扫激光检测计算原理,使用2d相机检测出来激光线被遮挡物体高度,怎么把图片进行3d点云重建或拼接,本人测试计算时间预计90秒,觉得目前算法应该不合理,请做过这类检测的老板,给与帮助。

线扫激光检测计算原理,使用2d相机检测出来激光线被遮挡物体高度,怎么把图片进行3d点云重建或拼接,本人测试计算时间预计90秒,觉得目前算法应该不合理,请做过这类检测的老板,给与帮助。
 分享
分享
 关注
关注🕗晚上好,题主!目前:🟢[在线]
📢参考通义千问、由郭老师整理提供!
📣今日诗号:落花人独立,微雨燕双飞。
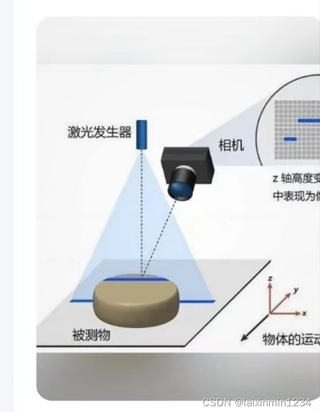
线扫激光检测技术结合2D相机主要依赖于同步旋转扫描和相机曝光捕捉的过程来实现3D点云的构建。以下是一个简化的步骤说明以及优化算法的一般性建议:
系统设置与工作流程:
图像处理:
3D点云生成:
效率优化:
代码层面:
鉴于您提到具体的代码编写问题,没有实际代码的情况下无法直接提供修改方案。但是您可以参考以上思路,针对您的算法和现有代码结构进行审查和调整:
如果您能提供更详细的信息,包括使用的编程语言、现有的代码片段和瓶颈分析,可能会得到更具针对性的帮助。不过请注意,CSDN平台更适合此类具体编程问题的讨论和代码分享。
分享 系统已结题
4月4日
系统已结题
4月4日 创建了问题
3月27日
创建了问题
3月27日


