六自由度并联机构动平台求解其雅可比矩阵,及其条件数过程,微分雅可比矩阵

六自由度并联机构动平台求解其雅可比矩阵,及其条件数过程,微分雅可比矩阵
 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
对于您提出的关于六自由度并联机构动平台的雅可比矩阵计算及条件数分析的问题,我们可以遵循以下步骤进行解决:
一、建立并联机构模型
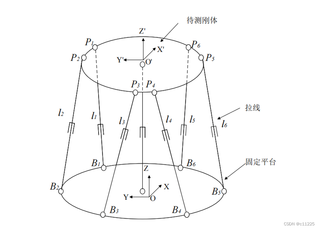
根据您提供的信息,可以推断出这是一个由6根拉线(B1-B6)连接待测刚体与固定平台的六自由度并联机构。其中,P20、OO、QP5、P3、P4是可能的传感器或关节位置标识,Z轴和X轴代表刚体坐标系的方向。为便于描述,我们将其简化表示为一个基本的六自由度并联机构模型,如下所示:
固定平台 (O)
|
B1-------+-------B2
|
B3-------+-------B4
|
B5-------+-------B6
|
待测刚体 (G)
二、构建雅可比矩阵
雅可比矩阵J描述了动平台位姿变化(旋转和平移)与各驱动器(即拉线)位移之间的关系。设动平台相对于固定平台的位姿由旋转向量ω=(ωx, ωy, ωz)和位移向量t=(tx, ty, tz)表示,而各拉线的位移为u=(u1, u2, ..., u6),则雅可比矩阵定义为:
[ J = \begin{bmatrix} \frac{\partial t}{\partial u} \ \frac{\partial \omega}{\partial u} \end{bmatrix} ]
其中,上半部分对应平移雅可比矩阵Jt,下半部分对应旋转雅可比矩阵Jr。
由于实际计算过程中涉及复杂的几何关系和运动学方程,通常需要利用解析法、数值法或CAD软件辅助建模求解。这里仅提供理论框架,具体计算过程需依赖于具体的机构参数和数学模型。在实际操作中,建议使用专业机械设计软件(如ADAMS、SolidWorks Motion等)或编程语言(如Python配合Screw Theory库)进行精确建模和计算。
三、计算条件数
雅可比矩阵的条件数反映了系统对输入误差的敏感程度,计算公式为:
[ \text{Cond}(J) = ||J||_2 ||J^{-1}||_2 ]
其中,||·||_2 表示矩阵的2-范数。条件数越大,表明系统对输入微小变化的响应越显著,即系统的动态特性可能较差,控制精度较低。
四、微分雅可比矩阵
微分雅可比矩阵用于描述动平台速度与驱动器速度之间的关系,它是雅可比矩阵对时间的导数。设动平台速度为V_G=(v_x, v_y, v_z, ω_x, ω_y, ω_z)^T,驱动器速度为V_u=(v1, v2, ..., v6)^T,则微分雅可比矩阵定义为:
[ \dot{J} = \frac{\partial V_G}{\partial V_u} ]
同样,微分雅可比矩阵的具体计算也需要依据机构的详细参数和运动学模型进行。
总结来说,要完成您的请求,需要具备以下步骤:
由于缺少具体的机构参数和数学模型,此处无法直接给出完整的代码或图形。建议您使用专业的机械设计软件或编程环境(如Python搭配相关库),结合您的具体机构数据进行详细计算。
如果您能提供更具体的信息(如机构尺寸、关节约束等),我可以协助您进一步细化计算步骤或指导如何使用相关软件进行计算。
分享 已结题
(查看结题原因) 4月6日
创建了问题
4月6日
已结题
(查看结题原因) 4月6日
创建了问题
4月6日


