利用两个按钮在stm32和proteus里实现pwm控制占空比

利用两个按钮在stm32和proteus里实现pwm控制占空比
 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
要实现这个功能,你需要按照以下步骤操作:
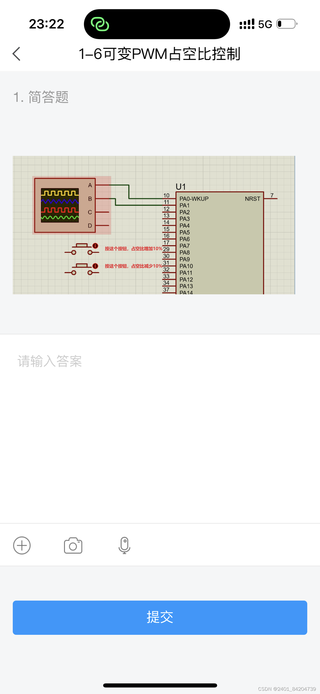
首先,确保你已经正确设置了STM32的时钟系统,并且知道如何配置GPIO和定时器。这里是一个基本的示例代码,它使用TIM2作为PWM源,PA9和PA10分别连接到两个按钮。我们将使用TIM2的CH1通道来产生PWM信号,PA2为输出引脚。
#include "stm32f4xx.h"
// 定义常量
#define PWM_CHANNEL TIM_CHANNEL_1
#define PWM_PIN GPIO_PIN_2
#define BUTTON_UP GPIO_PIN_9
#define BUTTON_DOWN GPIO_PIN_10
#define DELAY_INCREMENT 10 // 占空比增量(%),这里是10%
void SystemClock_Config(void);
void MX_GPIO_Init(void);
void MX_TIM2_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
while (1)
{
if (HAL_GPIO_ReadPin(GPIOA, BUTTON_UP) == GPIO_PIN_SET)
{
UpdatePWM(DELAY_INCREMENT); // 按钮上增加占空比
}
else if (HAL_GPIO_ReadPin(GPIOA, BUTTON_DOWN) == GPIO_PIN_SET)
{
UpdatePWM(-DELAY_INCREMENT); // 按钮下减少占空比
}
}
}
void SystemClock_Config(void)
{
// ... 这部分是关于时钟配置的,根据你的STM32型号进行设置 ...
}
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = BUTTON_UP | BUTTON_DOWN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = PWM_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OCInitTypeDef sConfigOC;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8399; // 72MHz / 8400 = 8.5kHz PWM频率
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 100; // 100个周期,每个周期为84ns,总时间为8.4us
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_Base_Init(&htim2);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0; // 初始占空比为0%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, PWM_CHANNEL);
HAL_TIM_PWM_Start(&htim2, PWM_CHANNEL);
}
void UpdatePWM(int increment)
{
int new_pulse = htim2.Instance->CCR1 + increment * htim2.Init.Period / 100;
if (new_pulse < 0)
{
new_pulse = 0;
}
else if (new_pulse > htim2.Init.Period)
{
new_pulse = htim2.Init.Period;
}
htim2.Instance->CCR1 = new_pulse;
}
这段代码将配置一个8.5kHz的PWM波形,通过改变CCR1寄存器的值来调整占空比。当用户按下上升按钮时,占空比增加10%,按下下降按钮时,占空比减少10%。注意,这只是一个基础的示例,实际应用可能需要更多的错误处理和边缘情况处理。
对于 Proteus 软件仿真,你需要在 proteus 中添加相应的STM32微控制器模型、GPIO 和定时器组件。然后,将按钮与 GPIO 引脚相连,将定时器的输出连接到 PWM 输出引脚。在 proteus 的软件环境中,你可以创建一个计数器来模拟占空比的变化,当按钮被触发时,修改计数器的值,并相应地调整定时器的占空比。
由于 Proteus 不支持 C 代码执行,你需要在 proteus 中手动编写事件驱动的伪代码,以便在按钮按下时更新占空比。这通常涉及创建一个计数值,每次按钮按下时增加或减去一定数量,然后根据计数值调整 PWM 信号的占空比。这在 proteus 中可能需要一些额外的研究,因为它的编程环境不同于传统的嵌入式开发。你可以参考 proteus 的官方文档或教程来学习如何实现这一功能。
分享 创建了问题
4月17日
创建了问题
4月17日


