在matlab中进行计算并写出代码,附上相应注释。
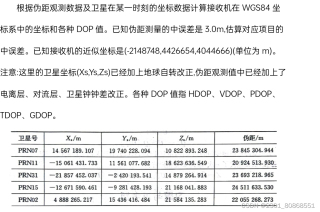
根据伪距观测数据及卫星在某一时刻的坐标数据计算接收机在WGS84坐标系中的坐标和各种DOP值。已知伪距测量的中误差是3.0m,估算对应项目的中误差。已知接收机的近似坐标是(-2148748,4426654,4044666)(单位为m)。注意:这里的卫星坐标(Xs,Ys,Zs)已经加上地球自转改正,伪距观测值中已经加上了电离层、对流层、卫星钟钟差改正。各种DOP值指HDOP、VDOP、PDOP、TDOP、GDOP。

在matlab中进行计算并写出代码,附上相应注释。
根据伪距观测数据及卫星在某一时刻的坐标数据计算接收机在WGS84坐标系中的坐标和各种DOP值。已知伪距测量的中误差是3.0m,估算对应项目的中误差。已知接收机的近似坐标是(-2148748,4426654,4044666)(单位为m)。注意:这里的卫星坐标(Xs,Ys,Zs)已经加上地球自转改正,伪距观测值中已经加上了电离层、对流层、卫星钟钟差改正。各种DOP值指HDOP、VDOP、PDOP、TDOP、GDOP。
 分享
分享
晚上好🌙🌙🌙
本答案参考ChatGPT-3.5
根据伪距观测数据及卫星在某一时刻的坐标数据计算接收机在WGS84坐标系中的坐标和各种DOP值,其中已知伪距测量的中误差是3.0m。下面是求解步骤:
$$ \rho_i = \sqrt{(x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2} + c(dt - dts_i) + \epsilon_i, \quad i=1,2, \cdots, n $$
其中 $\rho_i$ 为第 $i$ 颗卫星的伪距观测值,$(x_i,y_i,z_i)$ 为第 $i$ 颗卫星的位置,$c$ 为光速,$\epsilon_i \sim N(0,\sigma^2)$ 为误差项,$\sigma$ 表示伪距测量的中误差。
$$ Ax = b + e $$
其中 $A$ 是 $4n \times 4$ 的设计矩阵,$x = (x,y,z,dt)$ 是未知参数向量,$b$ 是 $4n$ 维的观测值向量,$e$ 是误差向量。
求解上述方程,得到未知参数向量 $x$。
计算接收机位置 $(x,y,z)$ 和卫星位置误差 $(dx_i,dy_i,dz_i)$,即:
$$ dx_i = x - x_i, \quad dy_i = y - y_i, \quad dz_i = z - z_i, \quad i=1,2, \cdots, n $$
计算 $4 \times 4$ 的协方差矩阵 $Q_{xx}$,其中 $Q_{xx}(1:3,1:3)$ 表示接收机位置误差的协方差矩阵,$Q_{xx}(4,4)$ 表示接收机钟差的方差。
计算各种 DOP 值,即:
代码如下所示:
分享 已结题
(查看结题原因) 4月26日
创建了问题
4月26日
已结题
(查看结题原因) 4月26日
创建了问题
4月26日

