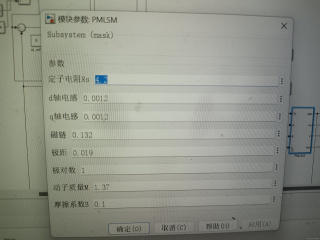
pi调节器的p用的带宽×d轴电感
i用带宽×定子电阻
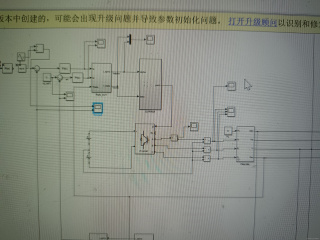
出现非常大的畸变
不知道是不是公式使用错误

 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
在永磁直线电机(PMLSM)中,电流环PI控制器的设计对于实现良好的电流跟踪性能至关重要。您提到的PI调节器参数设置方法(P = 带宽 × d轴电感, I = 带宽 × 定子电阻)似乎基于一些简化的假设,这在实际应用中可能不完全适用,尤其是当系统存在非线性、负载变化或参数不确定性时。
畸变原因:畸变可能是由于PI控制器参数选择不当导致的。PI控制器的参数P(比例增益)和I(积分增益)的选择应当基于系统的频率响应特性,特别是考虑穿越频率(bandwidth)和相位裕度等因素。仅用带宽乘以物理参数可能忽略了系统动态特性的复杂性。
参数调整策略:
首先确保对您的PMLSM模型有准确的理解,包括但不限于:
进行开环测试(如果可能的话),了解电机本身的响应特性,这有助于后续闭环设计。
利用仿真软件(如MATLAB/Simulink)进行频率响应分析,确保系统具有足够的稳定性裕度(通常要求相位裕度>45°,增益裕度>6dB)。
% 假设已知穿越频率bw和相位裕度pm
bw = ...; % Hz, 设定的穿越频率
pm = ...; % 度, 目标相位裕度
% 计算PI参数(简化计算,实际情况可能更复杂)
Kp = 2 * tan(pm * pi / 180) / bw;
Ki = Kp / (bw * (1 + sqrt(1 - (tan(pm * pi / 180))^2)));
% 将计算出的参数应用于Simulink中的PI控制器模块
set_param('your_PI_block', 'P', num2str(Kp));
set_param('your_PI_block', 'I', num2str(Ki));
请根据上述建议,结合您的具体情况进行调整,并保持耐心,因为电流环的调优往往是一个反复试验的过程。
分享 永磁同步直线电机PMLSM矢量控制滑模控制SVPWM仿真模型的研究
外环控制器:PI与滑膜控制策略的效果分析与三相电流波形优化,永磁同步直线电机PMLSM矢量控制滑模控制SVPWM仿真模型的研究
外环 基于线性自抗扰控制的永磁同步直线电机Simulink仿真模型:位置电流双闭环控制结构与负载扰动分析,基于离散化仿真的LADRC-PI混合控制:永磁同步直线电机的Simulink模型,ADRC基于线性自
永磁同步直线电机PMLSM矢量控制滑模控制SVPWM仿真模型的研究
外环控制器:PI与滑膜控制策略的效果分析与三相电流波形优化,永磁同步直线电机PMLSM矢量控制滑模控制SVPWM仿真模型的研究
外环 基于线性自抗扰控制的永磁同步直线电机Simulink仿真模型:位置电流双闭环控制结构与负载扰动分析,基于离散化仿真的LADRC-PI混合控制:永磁同步直线电机的Simulink模型,ADRC基于线性自 系统已结题
5月5日
系统已结题
5月5日 创建了问题
4月27日
创建了问题
4月27日

