

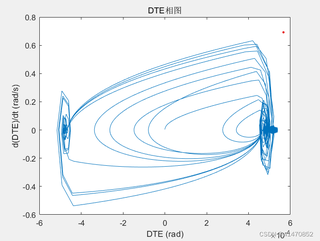
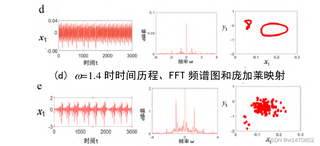
主程序见图二图三,求解微分方程,目前已得出微分方程的时域响应以及相图,可否再把相图转换为如下图所示的庞加莱映射,有合适的修改建议吗,感谢感谢
clear;clc;close all;
%初始参数,该参数变化,myfun程序要对应调整
syms t;
syms v;
% t=@(v)(505.2*ln(49897/(55000-398.7*v))+1460*(12.8-v)/398.7);
v=@(t)finverse(t);
t_of_v = @(v)(505.2*log(49897/(55000-398.7*v))*2.3+1460*(12.8-v)/398.7);
% % 使用数值方法求解速度 v 关于时间 t 的反函数
finverse = @(t) fzero(@(v) t_of_v(v)-t, 5);
zi=4;%内转子极对数
zo=14;%外转子极对数k
z1=32;%小齿轮齿数
z2=99;%大齿轮齿数
ms=4.62e-3;
I=z2/z1;%机械齿轮速比
G=(zo+zi)/zi;%磁齿轮速比
%一、计算过程
tmax=4.79;
tspan = 0:1e-4:tmax;
bc=1e-4;
y0=[0;0;0;wm_func(0);wm_func(0)/G;wm_func(0)/(G*I)];
[t,y]=odeRK4sys('myfun3',tmax,bc,y0);
figure;plot(t,y(:,1)/G-y(:,2));
signal = y(:,1)/G - y(:,2);
set(gca,'FontSize',16);
title('时域响应图','FontSize',16);
xlabel('时间 (s)','FontSize',16);
ylabel('扭转振幅(rad)','FontSize',16);%磁齿轮的相对弹性角度
figure;plot(t,y(:,2)/I-y(:,3));
signal1=y(:,2)/I-y(:,3);
set(gca,'FontSize',16);
title('时域响应图','FontSize',16);
xlabel('时间 (s)','FontSize',16);
ylabel('扭转振幅(rad)','FontSize',16);%机械齿轮的相对弹性转角;
DTE = y(:,1)/G - y(:,2); % DTE (电磁弹性角度)
dDTE_dt = gradient(DTE, t); % DTE的一阶导数
% 绘制相图
figure;
plot(DTE, dDTE_dt);
title('DTE相图');
xlabel('DTE (rad)');
ylabel('d(DTE)/dt (rad/s)');
DTE = y(:,2)/I - y(:,3); % DTE (电磁弹性角度)
dDTE_dt = gradient(DTE, t); % DTE的一阶导数
% 绘制相图
figure;
plot(DTE, dDTE_dt);
title('DTE相图');
xlabel('DTE (rad)');
ylabel('d(DTE)/dt (rad/s)');
function dydt=myfun3(t,y,wm_func)
v=@(t)finverse(t);
t_of_v = @(v)(505.2*log(49897/(55000-398.7*v))*2.3+1460*(12.8-v)/398.7);
finverse = @(t) fzero(@(v) t_of_v(v)-t, 5);
wm_func = @(t)((finverse(t)*3.6)*9550/(3600*0.4064/(0.93*14)))*pi*2/60;
wm=wm_func(t);
zi=4;%内转子极对数
zo=14;%外转子极对数
z1=32;%小齿轮齿数
z2=99;%大齿轮齿数
arf0=20/180*pi;%压力角
ms=4.62e-3;
r2=ms*z1/2;%小齿轮分度圆
r3=ms*z2/2;%大齿轮分度圆
rb2=r2*cos(arf0);%小齿轮基圆
rb3=r3*cos(arf0);%大齿轮基圆
I=z2/z1;%机械齿轮速比
G=(zo+zi)/zi;%磁齿轮速比
Tm=9550*55/(60*wm/(2*pi));
% Tm=114.8;
TL=Tm*I*G;%变速器负载
%3 转动惯量
IM=0.081197;%电机转子转动惯量kgm2
I0=0.181197;%磁齿轮低速级转动惯量kgm2
I1=0.013663;%磁齿轮高速级转动惯量kgm2
I2=0.0230596;%机械小齿轮转动惯量
I3=1.9825692;%机械大齿轮转动惯量
IL=21;%整车等效转动惯量
%4 刚度与阻尼
%齿轮的阻尼和刚度
w1=wm*G;%机械小齿轮输入转速
kp=10.51e8;
kb=0.25e8;%两个齿轮的刚度曲线为正弦曲线,
km=kp+kb*sin(w1*t*z1);
sg=0.16;%齿轮阻尼比
cm=2*sg*sqrt(kp*I2*I3/(I2*rb3^2+I3*rb2^2));
b=1e-4;
xx=rb2*y(2)-rb3*y(3);
dxx=rb2*y(5)-rb3*y(6);
if xx-b>0
fx=xx-b;
elseif xx+b<0
fx=xx+b;
else
fx=0;
end
F23=km*fx+cm*dxx;
T0=1.7*Tm*G;
Tc1=0.2*T0*sin(wm*t);
Tc=0.1*(zi*y(4)-(zi+zo)*y(5));
T21=T0*sin(zi*y(1)-(zi+zo)*y(2))+Tc+Tc1;
y(7)=(Tm-T21/G)/(I0+IM);
y(8)=(T21-r2*F23)/(I2+I1);
y(9)=(-TL+r3*F23)/(I3+IL);
dydt=[y(4)
y(5)
y(6)
y(7)
y(8)
y(9)];
end








