最近在调平衡小车的pid代码,现在调到最后有一个问题,就是刚开始的时候非常稳定,抗干扰也非常好,但是随着时间推移逐渐开始有抖动,接着就稳定不了了,请问这个问题是哪一个参数没有调好,我采取的方案是串级pid的方案,即直立环+速度环
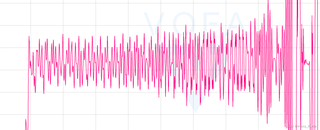
用ovfa查看角度信息是这样:角度是逐渐发散的

最近在调平衡小车的pid代码,现在调到最后有一个问题,就是刚开始的时候非常稳定,抗干扰也非常好,但是随着时间推移逐渐开始有抖动,接着就稳定不了了,请问这个问题是哪一个参数没有调好,我采取的方案是串级pid的方案,即直立环+速度环
用ovfa查看角度信息是这样:角度是逐渐发散的
 分享
分享
以下回复参考:皆我百晓生、券券喵儿等免费微信小程序作答:
关于STM32平衡车的PID调参问题,你描述的现象(即开始时稳定,但随时间推移出现抖动并最终失去稳定性)可能与多个PID参数有关。在串级PID方案(直立环+速度环)中,每个环的PID参数都需要精细调整。以下是一些可能的原因和解决方法:
直立环的PID参数调整:
速度环的PID参数调整:
动态特性与参数调整:
噪声干扰:
算法实现:
其他因素:
解决方法:
总的来说,平衡车的PID调参是一个复杂的过程,需要多次试验和调整。建议根据系统的实时反馈和表现来调整参数,以达到最佳效果。
分享 系统已结题
9月29日
系统已结题
9月29日 已采纳回答
9月21日
修改了问题
9月14日
创建了问题
9月12日
已采纳回答
9月21日
修改了问题
9月14日
创建了问题
9月12日


