问题描述:ros2 run 找不到节点node
file:///home/qq/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-11-19%2021-38-12.png

问题描述:ros2 run 找不到节点node
 分享
分享
以下回复参考:皆我百晓生、券券喵儿等免费微信小程序作答:
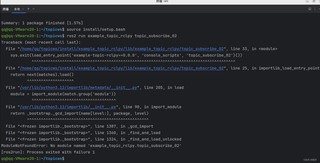
根据您提供的信息和图片,看起来您在尝试运行ROS 2节点时遇到了问题。错误信息显示无法找到名为apos;exampletopicrclpy.topic subscribe02的模块。这可能是由于以下几个原因导致的:
example_topic_rclpy包是否存在于您的topicws工作空间中,并且topic_subscribe_02节点是否在该包内。source install/setup.bash后,确保您的终端会话中包含了正确的环境变量。ModuLeNotFoundError可能表明Python在尝试导入模块时没有找到正确的路径。您可以尝试更新Python的PYTHONPATH环境变量,以确保它包括您的ROS 2工作空间的路径。您可以尝试以下步骤来解决这个问题:
PYTHONPATH环境变量,以确保它包括您的ROS 2工作空间路径。如果问题仍然存在,您可能需要检查ROS 2的文档或寻求社区的帮助,以获取更具体的解决方案。
分享 创建了问题
11月19日
创建了问题
11月19日


