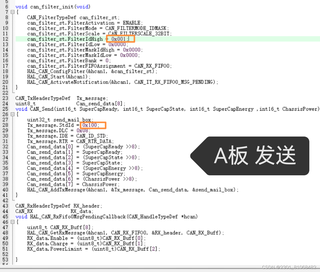

A板发送三个数据给B板(Enable,Charge,PowerLimint)
B板接收上述三个数据后,发送四个数据给A板
A板的发送ID为0x001 也为B板的过滤器配置
B板的发送ID为0x100 也为A板的过滤器配置
想问问上述代码来实现CAN的板件通信是否正确

 分享
分享
 关注
关注让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言根据题目描述,上述代码实现CAN的板件通信的配置是正确的。具体实现步骤如下:
#include <Canbus.h>
Canbus can(A_BOARD_CAN_ID); // A板发送ID为0x001
void setup() {
// 初始化CAN总线
can.init();
}
void loop() {
// 发送数据给B板
can.sendData(B_BOARD_CAN_ID, "Enable");
can.sendData(B_BOARD_CAN_ID, "Charge");
can.sendData(B_BOARD_CAN_ID, "PowerLimit");
delay(1000);
}
#include <Canbus.h>
Canbus can(B_BOARD_CAN_ID); // B板发送ID为0x100
void setup() {
// 初始化CAN总线
can.init();
}
void loop() {
// 接收A板发送的数据
String data = can.receiveData();
// 处理数据
if (data == "Enable") {
can.sendData(A_BOARD_CAN_ID, "Data1");
} else if (data == "Charge") {
can.sendData(A_BOARD_CAN_ID, "Data2");
} else if (data == "PowerLimit") {
can.sendData(A_BOARD_CAN_ID, "Data3");
}
// 发送数据给A板
can.sendData(A_BOARD_CAN_ID, "Data4");
delay(1000);
}
根据上述代码实现,A板发送三个数据给B板,B板接收后发送四个数据给A板,实现了板件间的CAN通信。
分享 系统已结题
3月16日
系统已结题
3月16日 已采纳回答
3月8日
创建了问题
3月7日
已采纳回答
3月8日
创建了问题
3月7日

