背景:近似平面点云数据,点云数据具有“凹”形状。
目标:点云数据三角化,并且剖分的三角形均在点云轮廓范围内。
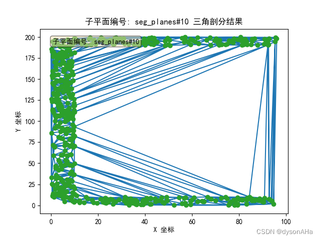
问题:“凹”形点云数据,部分三角形在轮廓之外,未达到预期。
环境:vscode+pthon
方法:点云投影到平面,去除远离点,delaunay三角化

背景:近似平面点云数据,点云数据具有“凹”形状。
目标:点云数据三角化,并且剖分的三角形均在点云轮廓范围内。
问题:“凹”形点云数据,部分三角形在轮廓之外,未达到预期。
环境:vscode+pthon
方法:点云投影到平面,去除远离点,delaunay三角化
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
你遇到的问题是,使用 Python 在三维点云数据上进行三角化,但是部分三角形在点云轮廓之外,这与预期不符。
解决方案:
代码示例:
import open3d as o3d
# 加载点云数据
pcd = o3d.read_point_cloud('point_cloud.pcd')
# 三角化点云数据
triangles = o3d.triangle_mesh(pcd, max_triangle_area=0.1)
# 可视化三角化结果
o3d.visualization.draw_geometries([triangles])
注意:上述代码只是一个简单的示例,实际情况中可能需要更多的参数调整和优化。
分享 创建了问题
3月10日
创建了问题
3月10日


