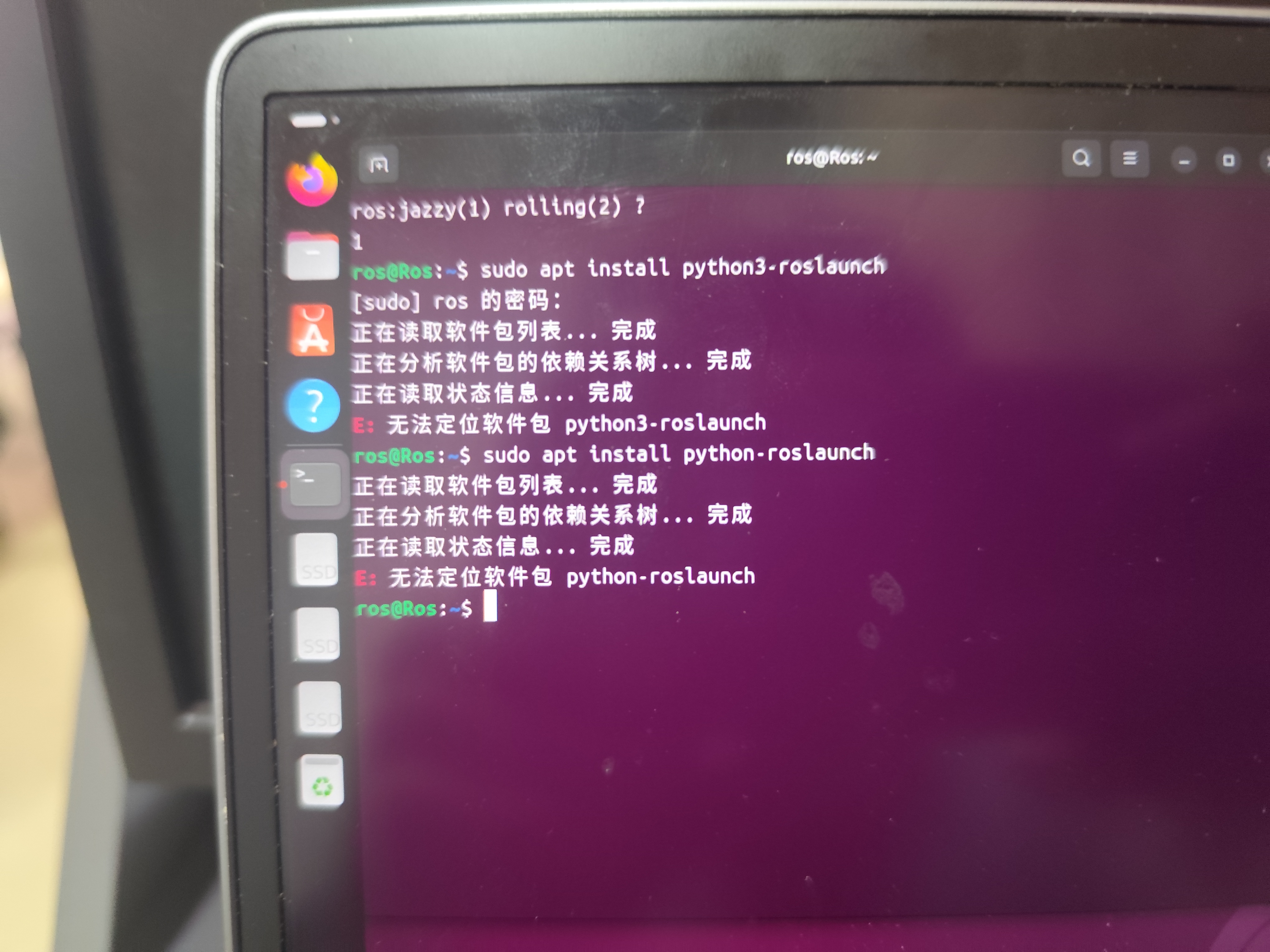
安装好ros后输入指令,出现需要安装软件包,但是安装软件包又无法定位软件包。

 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
/etc/apt/sources.list和/etc/apt/sources.list.d/目录下的文件。deb http://packages.ros.org/ros/ubuntu bionic main
deb-src http://packages.ros.org/ros/ubuntu bionic mainsudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt updateping packages.ros.org。希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 创建了问题
4月23日
创建了问题
4月23日

