



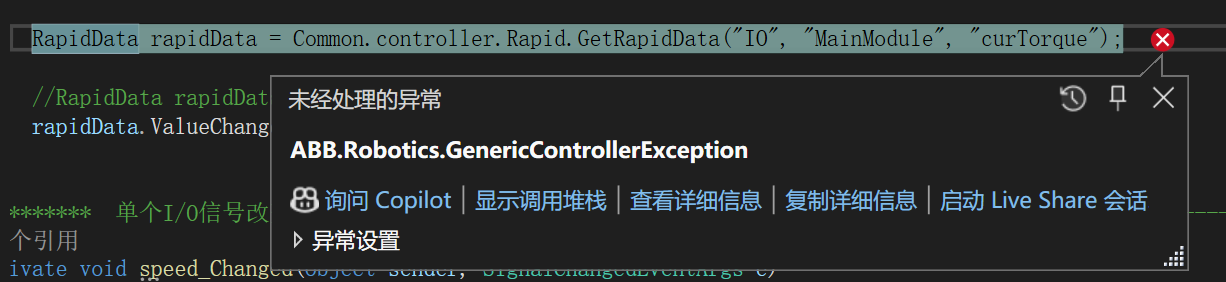
与ABB软件交互时这块就会报错,不知道问题在哪,刚接触交互,所以想问问这个问题的原因是啥

 分享
分享 分享
分享 ABB.Robotics.GenericControllerException
HResult=0xC0049000
Source=ABB.Robotics.Controllers.PC
StackTrace:
at Adapters.Rapid.GetSymbol(Url symbol)
at ABB.Robotics.Controllers.RapidDomain.Rapid.GetRapidData(String[] rapidData)
at ABB_PCSDK.Form1.Subscribe() in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Form1.cs:line 1007
at ABB_PCSDK.Form1.button1_Click(Object sender, EventArgs e) in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Form1.cs:line 113
at System.Windows.Forms.Control.OnClick(EventArgs e)
at System.Windows.Forms.Button.OnClick(EventArgs e)
at System.Windows.Forms.Button.OnMouseUp(MouseEventArgs mevent)
at System.Windows.Forms.Control.WmMouseUp(Message& m, MouseButtons button, Int32 clicks)
at System.Windows.Forms.Control.WndProc(Message& m)
at System.Windows.Forms.ButtonBase.WndProc(Message& m)
at System.Windows.Forms.Button.WndProc(Message& m)
at System.Windows.Forms.Control.ControlNativeWindow.OnMessage(Message& m)
at System.Windows.Forms.Control.ControlNativeWindow.WndProc(Message& m)
at System.Windows.Forms.NativeWindow.DebuggableCallback(IntPtr hWnd, Int32 msg, IntPtr wparam, IntPtr lparam)
at System.Windows.Forms.UnsafeNativeMethods.DispatchMessageW(MSG& msg)
at System.Windows.Forms.Application.ComponentManager.System.Windows.Forms.UnsafeNativeMethods.IMsoComponentManager.FPushMessageLoop(IntPtr dwComponentID, Int32 reason, Int32 pvLoopData)
at System.Windows.Forms.Application.ThreadContext.RunMessageLoopInner(Int32 reason, ApplicationContext context)
at System.Windows.Forms.Application.ThreadContext.RunMessageLoop(Int32 reason, ApplicationContext context)
at System.Windows.Forms.Application.Run(Form mainForm)
at ABB_PCSDK.Program.Main() in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Program.cs:line 20
这是报错的所有信息

 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
using System;
using System.IO.Ports;
class Program
{
static void Main()
{
using (SerialPort serialPort = new SerialPort("COM1", 9600, Parity.None, 8, StopBits.One))
{
try
{
serialPort.Open();
byte[] readBuffer = new byte[2];//假设读取2个字节的寄存器值
serialPort.Write(new byte[] { 0x01, 0x03, 0x00, 0x00, 0x00, 0x01, 0xC4, 0x0B }, 0, 8);
serialPort.Read(readBuffer, 0, 2);
//这里可以根据读取到的数据进行后续处理,比如转换为实际的值
Console.WriteLine($"Read value: {BitConverter.ToInt16(readBuffer, 0)}");
}
catch (Exception ex)
{
Console.WriteLine($"Error: {ex.Message}");
}
}
}
}
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 ABB.Robotics.GenericControllerException
HResult=0xC0049000
Source=ABB.Robotics.Controllers.PC
StackTrace:
at Adapters.Rapid.GetSymbol(Url symbol)
at ABB.Robotics.Controllers.RapidDomain.Rapid.GetRapidData(String[] rapidData)
at ABB_PCSDK.Form1.Subscribe() in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Form1.cs:line 1007
at ABB_PCSDK.Form1.button1_Click(Object sender, EventArgs e) in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Form1.cs:line 113
at System.Windows.Forms.Control.OnClick(EventArgs e)
at System.Windows.Forms.Button.OnClick(EventArgs e)
at System.Windows.Forms.Button.OnMouseUp(MouseEventArgs mevent)
at System.Windows.Forms.Control.WmMouseUp(Message& m, MouseButtons button, Int32 clicks)
at System.Windows.Forms.Control.WndProc(Message& m)
at System.Windows.Forms.ButtonBase.WndProc(Message& m)
at System.Windows.Forms.Button.WndProc(Message& m)
at System.Windows.Forms.Control.ControlNativeWindow.OnMessage(Message& m)
at System.Windows.Forms.Control.ControlNativeWindow.WndProc(Message& m)
at System.Windows.Forms.NativeWindow.DebuggableCallback(IntPtr hWnd, Int32 msg, IntPtr wparam, IntPtr lparam)
at System.Windows.Forms.UnsafeNativeMethods.DispatchMessageW(MSG& msg)
at System.Windows.Forms.Application.ComponentManager.System.Windows.Forms.UnsafeNativeMethods.IMsoComponentManager.FPushMessageLoop(IntPtr dwComponentID, Int32 reason, Int32 pvLoopData)
at System.Windows.Forms.Application.ThreadContext.RunMessageLoopInner(Int32 reason, ApplicationContext context)
at System.Windows.Forms.Application.ThreadContext.RunMessageLoop(Int32 reason, ApplicationContext context)
at System.Windows.Forms.Application.Run(Form mainForm)
at ABB_PCSDK.Program.Main() in F:\ABB_PCSDK\ABB_PCSDK\ABB_PCSDK\Program.cs:line 20
这是报错的所有信息
 关注
关注让【宝码香车】来帮你解答,本回答参考DeepSeek编写,并整理提供。
如果还有疑问可以点击头像关注私信或评论。如果答案让您满意,请采纳、点赞、关注,非常感谢!
根据您提供的代码片段和错误信息,您在使用ABB机器人控制器交互时遇到了ABB.Robotics.GenericControllerException异常。以下是可能的原因和解决方案:
Rapid变量路径不正确:
("I0", "MainModule", "curTorque")可能有误变量类型不匹配:
curTorque变量类型可能与代码期望的类型不符控制器连接问题:
权限问题:
try
{
RapidData rapidData = Common.controller.Rapid.GetRapidData("T_ROB1", "MainModule", "curTorque");
// 注意:第一个参数通常是任务名(如T_ROB1),不是I0
// 检查变量是否确实存在于MainModule中
}
catch (ABB.Robotics.GenericControllerException ex)
{
Console.WriteLine($"错误: {ex.Message}");
}
在ABB机器人示教器上:
if (Common.controller.Connected)
{
// 控制器已连接,可以继续操作
}
else
{
Console.WriteLine("控制器未连接");
// 重新建立连接
Common.controller.Logon(UserInfo.DefaultUser); // 使用适当用户
}
private void speed_Changed(object sender, EventArgs e)
{
try
{
RapidData rapidData = Common.controller.Rapid.GetRapidData("T_ROB1", "MainModule", "curTorque");
rapidData.ValueChanged += RapidData_ValueChanged;
// 其他操作...
}
catch (ABB.Robotics.GenericControllerException ex)
{
Console.WriteLine($"控制器错误: {ex.Message}");
// 检查日志获取更多信息
}
catch (Exception ex)
{
Console.WriteLine($"一般错误: {ex.Message}");
}
}
如果您能提供更完整的代码片段或更详细的错误信息(如堆栈跟踪),我可以给出更精确的解决方案。
分享 👉点击采纳/解决,采纳我的答案。
🔖重新去开一个帖子,再回复你。
⚠️注意:
希望早点解决你的问题。
 分享
分享 创建了问题
4月25日
创建了问题
4月25日


























