
图中已说明程序要求。凑字数12345678913184346919497

 分享
分享
 关注
关注让【宝码香车】来帮你解答,本回答参考DeepSeek编写,并整理提供。
如果还有疑问可以点击头像关注私信或评论。如果答案让您满意,请采纳、点赞、关注,非常感谢!
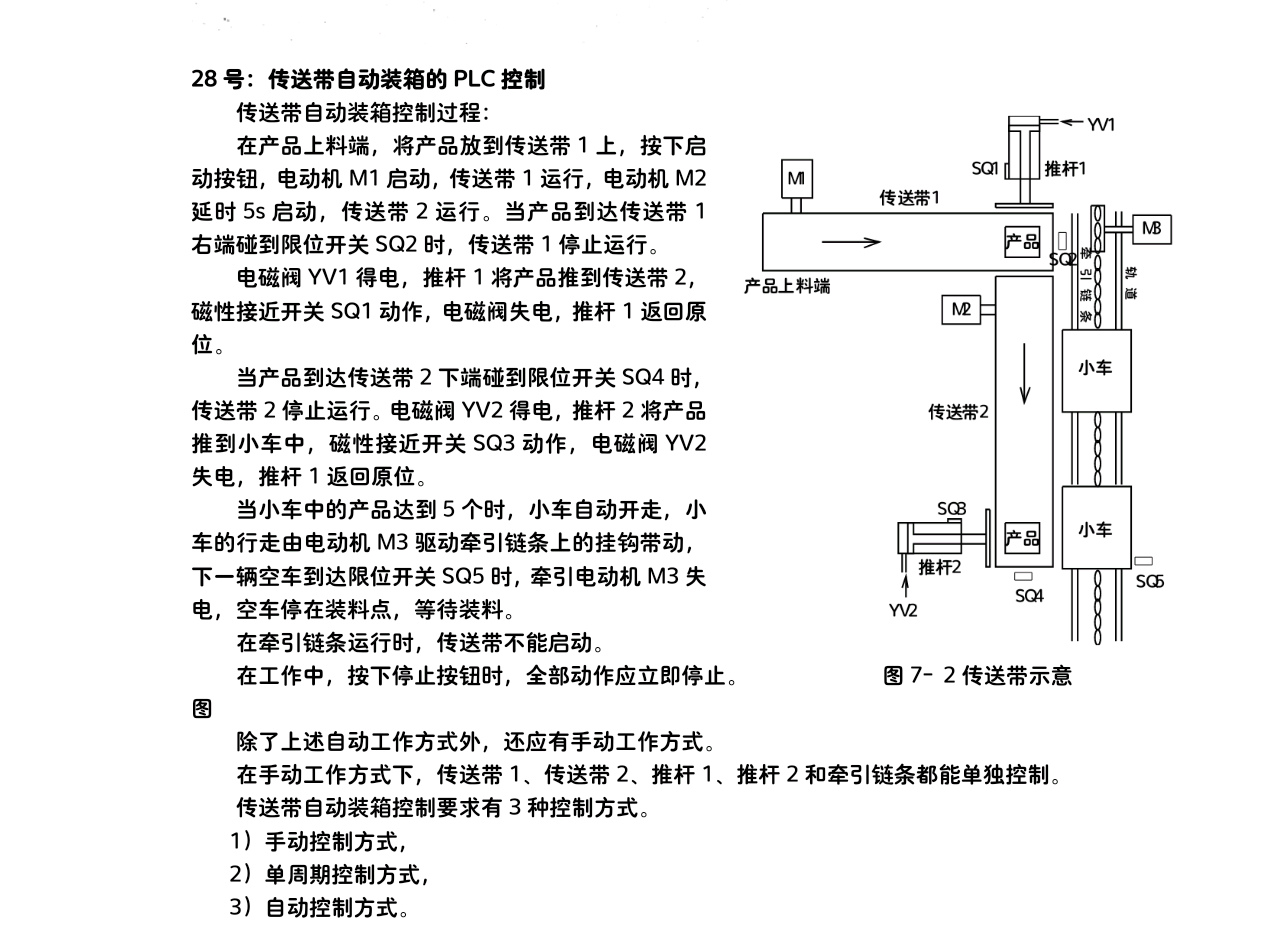
根据您提供的传送带自动装箱控制要求,我将为您设计一个基于三菱PLC的控制方案,使用GX Developer和GX Simulator进行编程和仿真。
首先需要确定PLC的输入输出点分配:
输入点:
X0 - 启动按钮
X1 - 停止按钮
X2 - 限位开关SQ2(传送带1右端)
X3 - 磁性接近开关SQ1(推杆1原位)
X4 - 限位开关SQ4(传送带2下端)
X5 - 磁性接近开关SQ3(推杆2原位)
X6 - 限位开关SQ5(空车到位)
X10 - 手动/自动选择开关
X11 - 单周期/连续选择开关
输出点:
Y0 - 电动机M1(传送带1)
Y1 - 电动机M2(传送带2)
Y2 - 电磁阀YV1(推杆1)
Y3 - 电磁阀YV2(推杆2)
Y4 - 电动机M3(牵引链条)
以下是主要控制逻辑的梯形图程序:
LD M8000
OUT M0 // 运行标志
// 手动控制部分
LD X10 // 手动模式
AND X0 // 启动按钮
OUT Y0 // 手动启动传送带1
// 自动控制部分
LD X10 // 自动模式
ANI X11 // 连续模式
AND X0 // 启动按钮
OR M1 // 运行中间标志
ANI X1 // 停止按钮
OUT M1 // 自动运行标志
// 传送带1控制
LD M1
OR Y0
ANI X2 // SQ2限位
OUT Y0 // 传送带1运行
// 传送带2延时启动
LD Y0
OUT T0 K50 // 5秒定时器
LD T0
OUT Y1 // 传送带2运行
// 推杆1控制
LD X2 // SQ2动作
AND Y0 // 传送带1运行中
OUT Y2 // 推杆1推出
LD X3 // SQ1动作
RST Y2 // 推杆1返回
// 推杆2控制
LD X4 // SQ4动作
AND Y1 // 传送带2运行中
OUT Y3 // 推杆2推出
LD X5 // SQ3动作
RST Y3 // 推杆2返回
// 产品计数
LD X5 // 推杆2完成
OUT C0 K5 // 计数5个产品
// 牵引链条控制
LD C0 // 计数达到5
OUT Y4 // 启动牵引链条
LD X6 // SQ5动作
RST Y4 // 停止牵引链条
RST C0 // 复位计数器
手动控制模式:
自动控制模式:
安全保护:
如果需要进一步完善系统,可以考虑:
这个设计方案满足题目要求的三种控制方式(手动、单周期、自动),并实现了传送带自动装箱的全部控制流程。您可以根据实际硬件配置调整I/O分配,并在仿真通过后下载到实际PLC中运行。
分享 系统已结题
5月12日
系统已结题
5月12日 已采纳回答
5月4日
创建了问题
5月4日
已采纳回答
5月4日
创建了问题
5月4日


