卫星影像实景三维模型的效果如图所示,模型格式一般为obj、osgb,这种模型能进行单体化吗?单体化后效果是什么样,单体化后是什么格式,能否添加属性等信息呢?如果可以单体化,那具体的视线流程是怎样的呢?**这块完全不懂,求专业人士解答
**
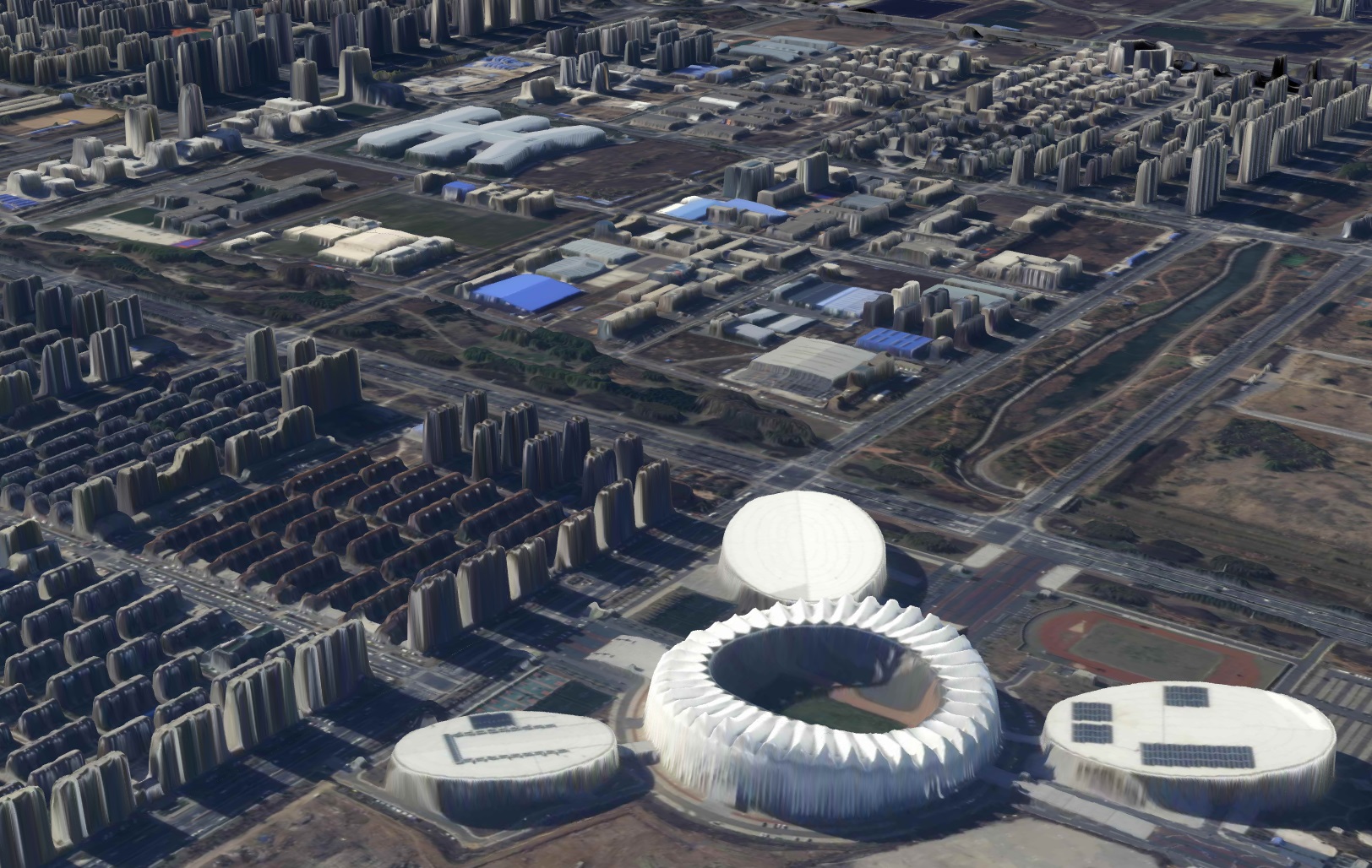

卫星影像实景三维模型的效果如图所示,模型格式一般为obj、osgb,这种模型能进行单体化吗?单体化后效果是什么样,单体化后是什么格式,能否添加属性等信息呢?如果可以单体化,那具体的视线流程是怎样的呢?**这块完全不懂,求专业人士解答
**
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
你想知道卫星影像实景三维模型是否可以单体化,并且了解单体化后的效果、格式和添加属性信息的过程。
卫星影像实景三维模型可以单体化,这个过程称为"instance segmentation"。单体化后,模型将被分割成多个实体,每个实体对应一个卫星影像实体。
常见的单体化算法包括:
单体化后的效果可以是:
单体化后的格式可以是:
添加属性信息可以使用:
视线流程可以是:
代码示例:
import numpy as np
import open3d as o3d
# 加载卫星影像数据
pcd = o3d.read_point_cloud('satellite_image.pcd')
# 单体化
instances = o3d.pipelines.segmentation.instance_segmentation(pcd, num_classes=5)
# 添加属性信息
for instance in instances:
instance.colors = np.random.rand(instance.points.shape[0], 3)
# 保存单体化后的模型
o3d.write_point_cloud('instance_segmentation.obj', instances)
#include <iostream>
#include <opencv2/opencv.hpp>
#include <Eigen/Dense>
int main() {
// 加载卫星影像数据
cv::Mat image = cv::imread("satellite_image.jpg");
// 单体化
std::vector<std::vector<cv::Point3f>> instances;
for (int i = 0; i < image.rows; i++) {
for (int j = 0; j < image.cols; j++) {
if (image.at<cv::Vec3b>(i, j)[0] > 0) {
instances.push_back({cv::Point3f(j, i, 0)});
}
}
}
// 添加属性信息
for (auto& instance : instances) {
instance.push_back(cv::Point3f(0, 0, 1));
}
// 保存单体化后的模型
std::ofstream obj_file("instance_segmentation.obj");
for (auto& instance : instances) {
obj_file << "v " << instance[0].x << " " << instance[0].y << " " << instance[0].z << std::endl;
obj_file << "v " << instance[1].x << " " << instance[1].y << " " << instance[1].z << std::endl;
obj_file << "f 1 2 3" << std::endl;
}
obj_file.close();
return 0;
}
注意:以上代码只是简单示例,实际实现中需要根据具体的卫星影像数据和需求进行修改。
分享 创建了问题
5月23日
创建了问题
5月23日

