
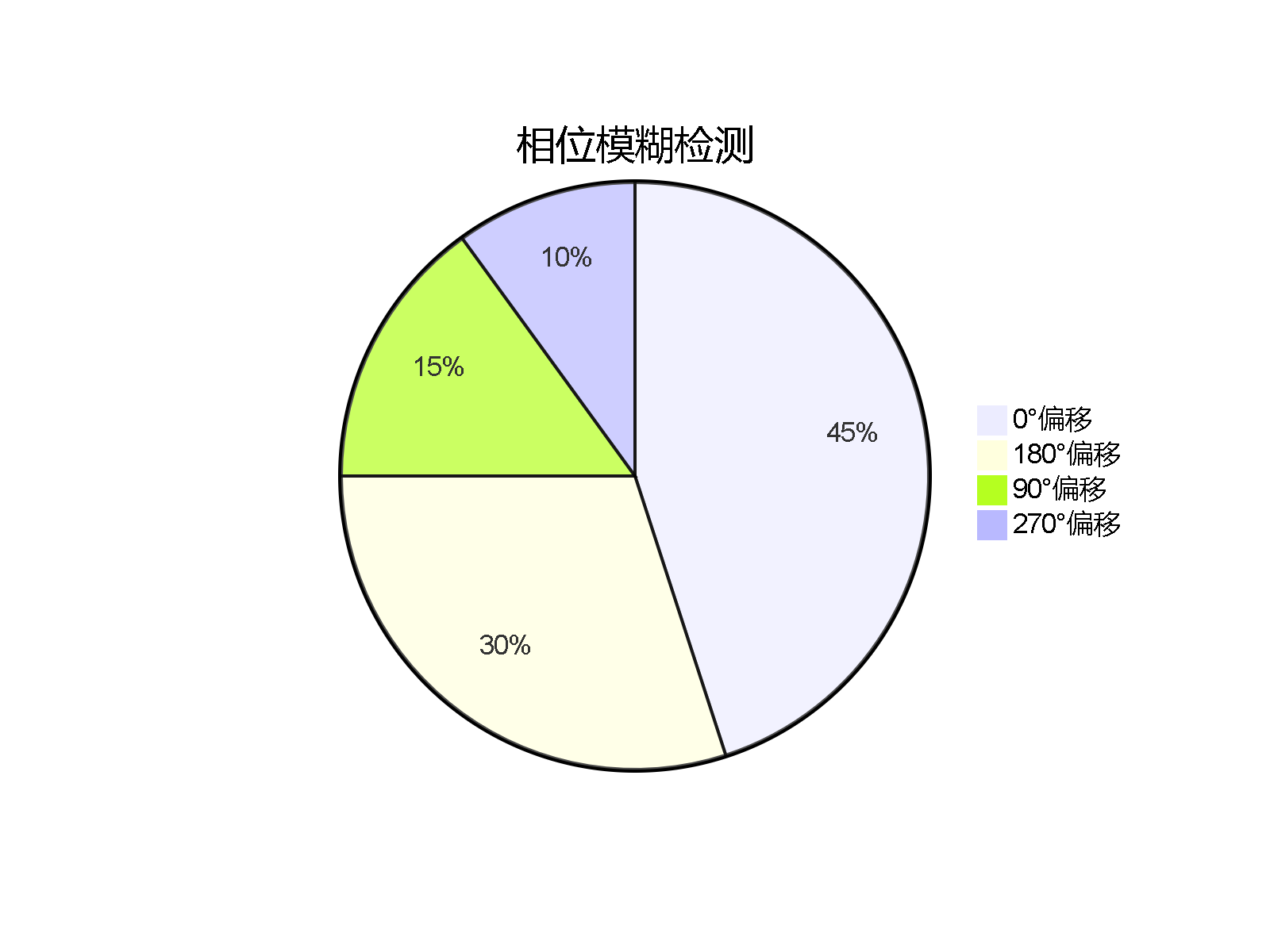
在OQPSK符号同步中,相位模糊问题是一个常见挑战。由于载波恢复过程中可能存在π/2或π的相位偏移,导致解调后的符号出现错误判决。如何解决这一问题?
一种常见方法是利用决策反馈技术。通过观察解调后的一系列比特序列,检测是否存在固定模式的翻转,并据此调整相位。例如,若连续多个符号均出现预期之外的反转,则可推测存在相位模糊,进而补偿相应相位差。
另一种方法是在发送端引入已知训练序列。接收端通过匹配滤波器比对训练序列,明确绝对相位参考,从而消除模糊性。此外,使用差分编码也是一种简单有效的解决方案,虽然会牺牲一定带宽效率,但能完全规避相位模糊带来的影响。具体选择取决于系统性能需求与复杂度权衡。


1条回答 默认 最新

 关注
关注让【宝码香车】来帮你解答,本回答参考DeepSeek编写,并整理提供。
如果还有疑问可以点击头像关注私信或评论。如果答案让您满意,请采纳、点赞、关注,非常感谢!
OQPSK符号同步中的相位模糊问题解决方案
在OQPSK(偏移正交相移键控)系统中,相位模糊问题确实是一个关键挑战,主要源于载波恢复过程中可能出现的π/2或π相位偏移。以下是几种有效的解决方案:
1. 决策反馈技术
这种方法通过监测解调后的比特序列来检测相位模糊:
def detect_phase_ambiguity(received_symbols, expected_pattern): # 比较接收符号与预期模式 phase_shift = 0 error_count = 0 for i in range(len(received_symbols)): # 检查是否存在π/2或π相位偏移 if not is_expected_symbol(received_symbols[i], expected_pattern[i]): error_count += 1 if error_count > threshold: # 计算可能的相位偏移 phase_shift = determine_phase_shift(received_symbols, expected_pattern) return phase_shift2. 训练序列方法
在数据帧前插入已知的训练序列:
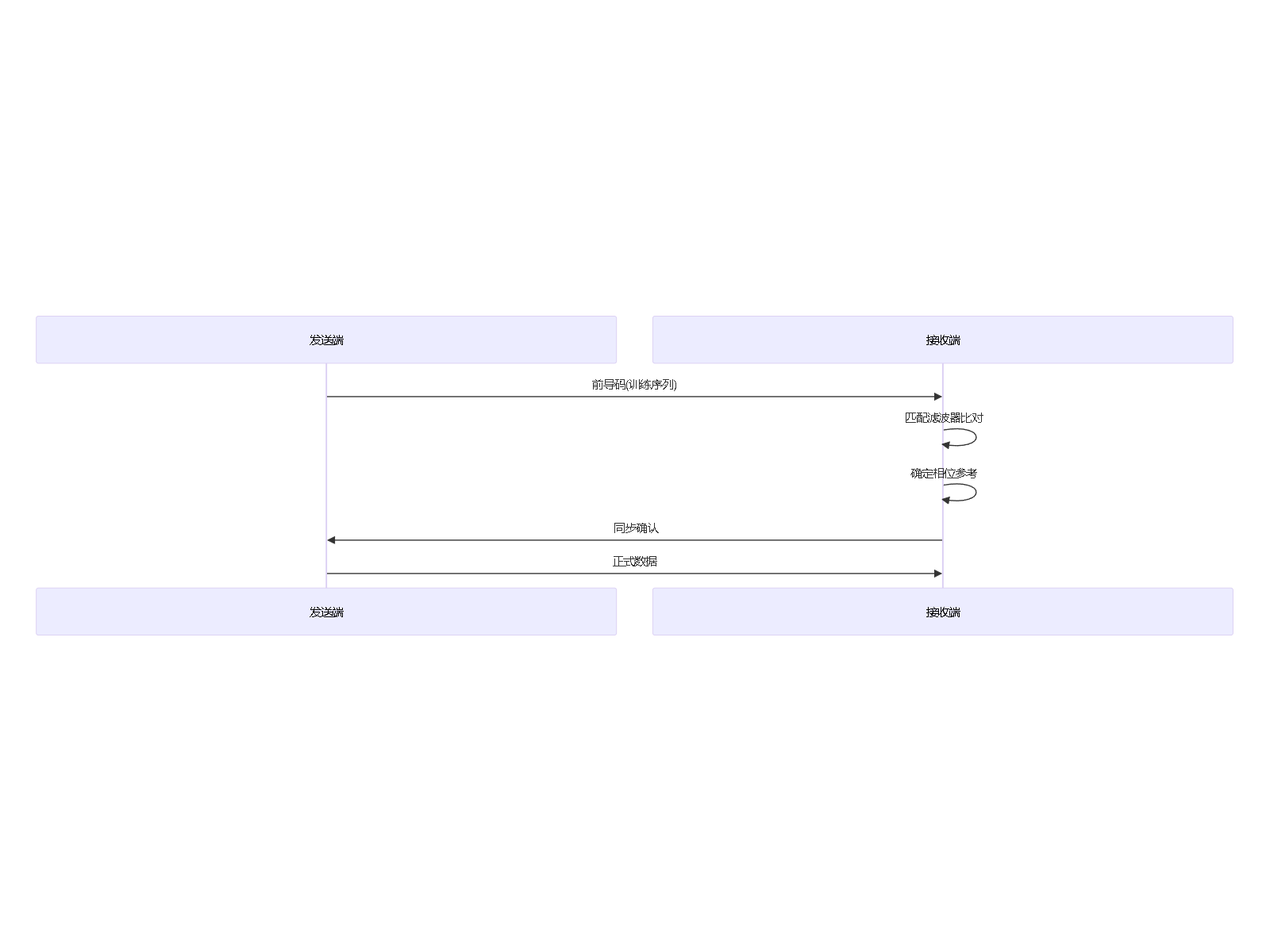
3. 差分编码方案
差分编码完全规避相位模糊问题:
// 差分编码示例 void differential_encode(uint8_t *data, int length) { uint8_t prev_bit = 0; for(int i = 0; i < length; i++) { uint8_t current_bit = data[i]; data[i] = current_bit ^ prev_bit; // 异或操作 prev_bit = current_bit; } }4. 星座图旋转检测
通过分析接收信号的星座图来检测相位偏移:
5. 最大似然相位估计
使用统计方法估计最可能的相位偏移:
function estimated_phase = ml_phase_estimation(received_signal, constellation) % 计算所有可能相位偏移的似然值 phase_candidates = 0:pi/2:2*pi; likelihood = zeros(size(phase_candidates)); for i = 1:length(phase_candidates) rotated = received_signal * exp(1j*phase_candidates(i)); distances = abs(rotated - constellation).^2; likelihood(i) = sum(exp(-distances/(2*noise_variance))); end [~, idx] = max(likelihood); estimated_phase = phase_candidates(idx); end方案选择建议
方法 优点 缺点 适用场景 决策反馈 无需额外带宽 需要一定收敛时间 连续传输系统 训练序列 快速准确 增加开销 分组传输系统 差分编码 完全避免模糊 降低带宽效率 低速率系统 星座分析 直观可靠 计算复杂 高性能接收机 实际系统中,常采用组合方法,如在帧头使用训练序列建立初始同步,后续通过决策反馈进行跟踪调整。
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
分享
- 2025-01-22 14:30fpga和matlab的博客 它规定了四种载波相位,分别为45°,135°,225°,315°,调制器输入的数据是二进制数字序列,为了能和四进制的载波相位配合起来,则需要把二进制数据变换为四进制数据,这就是说需要把二进制数字序列中每两个比特...
- 2025-01-30 17:21炳烛之明科技的博客 这种方法主要研究了正交调制法中两路信号的幅度或相位不平衡问题,并给出了解决方案。这是一种利用AM反馈来降低上述问题对调制信号影响的策略;以及基于此原理而设计出的一种新型数字中频接收机。Linz A和...
- 2022-12-04 17:59如松茂矣的博客 奈奎斯特是第一个解决在保持低传输带宽的同时克服符号间干扰问题的人。他观察到,如果通信系统(包括发射器、信道和接收器)的整体响应被设计成,在接收器的每个采样瞬间,除当前符号外的所有符号响应都为 0,那么 ...
- 2025-07-22 13:40EGG99的博客 本文提供了一份基于MATLAB的MSK调制解调完整实战指南。...文中重点解析了滤波器设计、时延对齐等工程实践中的常见“坑”,并附有可运行的代码和可视化对比图,帮助读者深入理解MSK的连续相位与恒包络特性。
- 2018-10-27 21:20weixin_30809333的博客 2.所谓移动通信,就是通信的一方或双方在移动中实现通信,也就是说,至少有通信的一方处于运动中,或暂时停留在某一个非预定的位置上。 3.其中包括移动台(汽车、火车、飞机、轮船等移动体上)与另一移动台之间的...
- 2008-01-30 11:43ShorminHsu的博客 ADL Administration Des cription Language 管理描述语言 ADL Application Development Language 应用开发语言 ADL Automatic Data Link 自动数据链路 ADLC Advanced Data Link Control 高级数据链路控制 ADLC ...
- 没有解决我的问题, 去提问

问题事件
 已采纳回答
10月23日
已采纳回答
10月23日-
创建了问题
5月25日