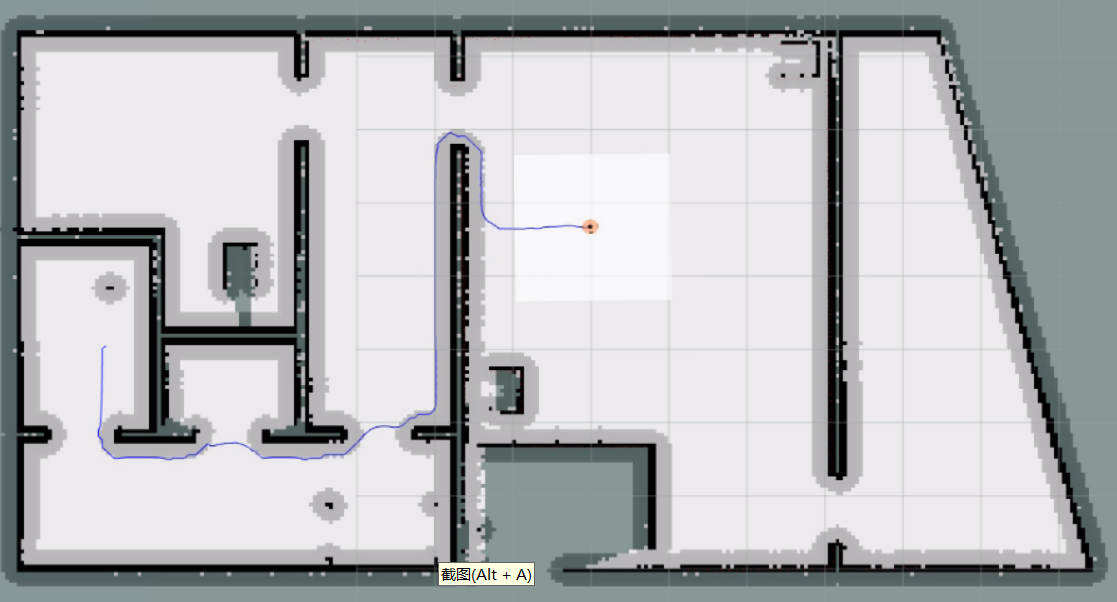
为什么全局路径规划的路线是这样的?紧紧贴着膨胀层,也很曲折,看着很不正常

为什么全局路径规划的路线是这样的?紧紧贴着膨胀层,也很曲折,看着很不正常
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
全局路径规划的路线设计通常受到多种因素的影响,包括环境地图、障碍物布局以及算法的实现方式。如果全局路径规划的路线看起来紧紧贴着膨胀层(即膨胀障碍物区域)并且显得非常曲折,可能有以下几个原因:
膨胀层的作用:
路径优化目标:
算法限制:
以下是几种可能的解决方案,可以帮助改善路径规划的结果:
优化路径平滑性:
def smooth_path(path, iterations=100, step_size=1.0):
smoothed_path = path.copy()
for _ in range(iterations):
for i in range(1, len(smoothed_path) - 1):
current_point = smoothed_path[i]
prev_point = smoothed_path[i - 1]
next_point = smoothed_path[i + 1]
new_point = (current_point[0] + step_size * (prev_point[0] + next_point[0] - 2 * current_point[0]),
current_point[1] + step_size * (prev_point[1] + next_point[1] - 2 * current_point[1]))
# Ensure the new point is not too close to obstacles
if not is_obstacle(new_point):
smoothed_path[i] = new_point
return smoothed_path
调整膨胀层大小:
def inflate_obstacles(obstacles, inflation_radius):
inflated_obstacles = []
for obstacle in obstacles:
inflated_obstacle = [(x + dx, y + dy) for x, y in obstacle for dx in range(-inflation_radius, inflation_radius + 1)
for dy in range(-inflation_radius, inflation_radius + 1)]
inflated_obstacles.extend(inflated_obstacle)
return inflated_obstacles
使用更高级的路径规划算法:
class RRT:
def __init__(self, start, goal, obstacle_list, expand_dis=1.0, max_iter=500):
self.start = Node(start[0], start[1])
self.goal = Node(goal[0], goal[1])
self.obstacle_list = obstacle_list
self.expand_dis = expand_dis
self.max_iter = max_iter
self.node_list = [self.start]
def planning(self):
for _ in range(self.max_iter):
rnd_node = self.get_random_node()
nearest_ind = self.get_nearest_node_index(rnd_node)
nearest_node = self.node_list[nearest_ind]
new_node = self.steer(nearest_node, rnd_node, self.expand_dis)
if self.check_collision(new_node, self.obstacle_list):
self.node_list.append(new_node)
if self.calc_dist_to_goal(self.node_list[-1].x, self.node_list[-1].y) <= self.expand_dis:
final_node = self.steer(self.node_list[-1], self.goal, self.expand_dis)
if self.check_collision(final_node, self.obstacle_list):
return self.generate_final_course(len(self.node_list) - 1)
return None
def steer(self, from_node, to_node, extend_length=float("inf")):
new_node = Node(from_node.x, from_node.y)
d, theta = self.calc_distance_and_angle(new_node, to_node)
new_node.x += extend_length * math.cos(theta)
new_node.y += extend_length * math.sin(theta)
return new_node
# Other helper methods...
结合全局与局部路径规划:
def combine_global_local_planning(global_path, local_planner):
local_path = local_planner.optimize(global_path)
return local_path
通过以上方法,可以有效改善全局路径规划的结果,使其更加合理和高效。
分享 创建了问题
5月30日
创建了问题
5月30日


