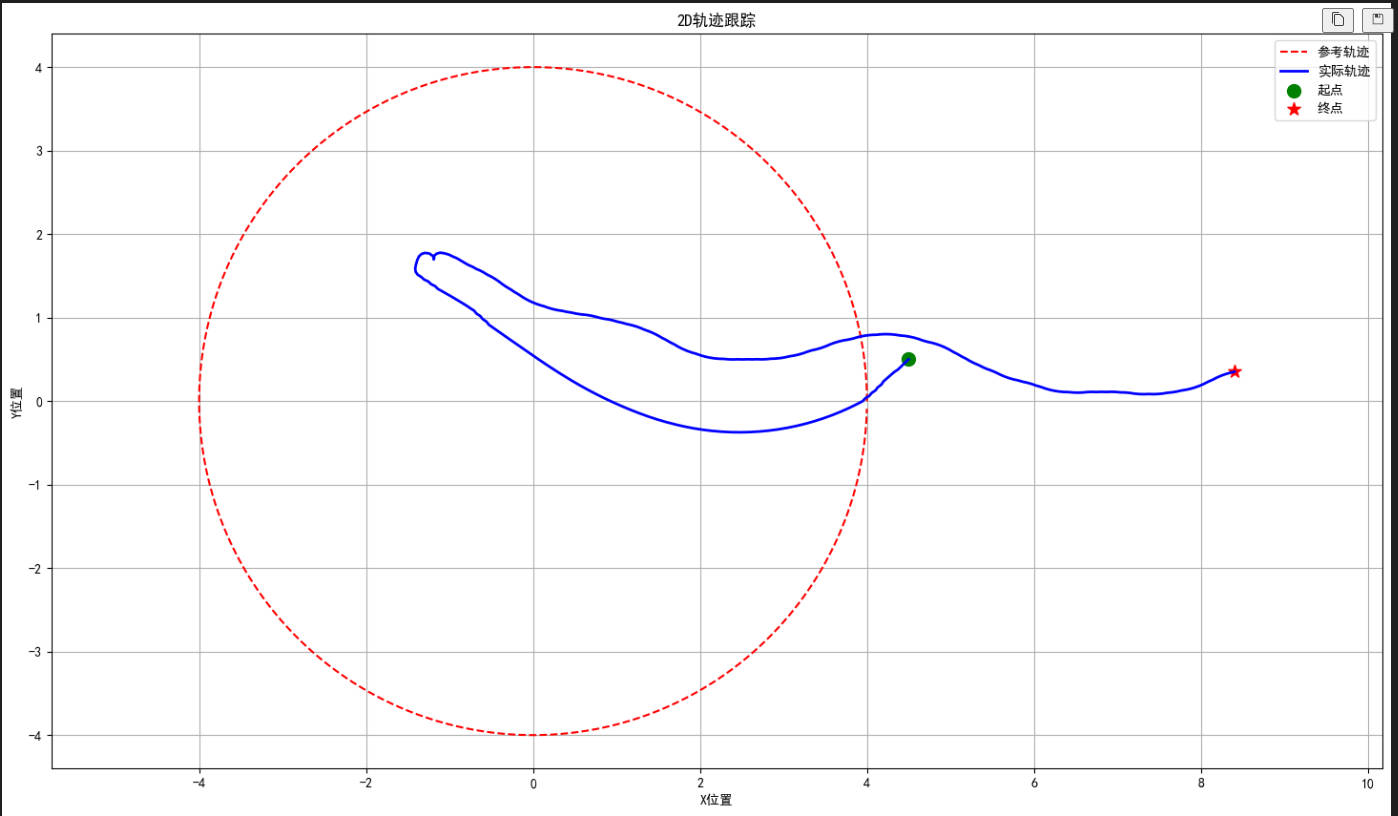
博主您好,我按照您的博客以及《无人驾驶车辆模型预测控制》这本书进行了公式推导和代码编写,但是实际预测的轨迹和跟踪的轨迹完全无法拟合,您能否给出一些指点。

博主您好,我按照您的博客以及《无人驾驶车辆模型预测控制》这本书进行了公式推导和代码编写,但是实际预测的轨迹和跟踪的轨迹完全无法拟合,您能否给出一些指点。
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
你好!我很高兴看到你在使用我的博客和《无人驾驶车辆模型预测控制》这本书进行公式推导和代码编写。然而,实际预测的轨迹和跟踪的轨迹完全无法拟合,这可能是由于以下几个原因:
为了解决这个问题,我建议你尝试以下几点:
如果你需要更多帮助,我可以提供更多的建议和代码示例。
import numpy as np
import matplotlib.pyplot as plt
# 生成随机数据
np.random.seed(0)
x = np.random.rand(100)
y = np.random.rand(100)
# 定义模型
def model(x, y):
# 使用 Kalman filter
A = np.array([[1, 0], [0, 1]])
B = np.array([[0.1], [0.1]])
Q = np.array([[0.1, 0], [0, 0.1]])
R = np.array([[0.1, 0], [0, 0.1]])
P = np.array([[1, 0], [0, 1]])
x_pred = np.zeros((len(x), 2))
for i in range(len(x)):
x_pred[i] = A @ x_pred[i-1] + B @ np.random.randn(2)
P = A @ P @ A.T + Q
K = P @ A.T @ np.linalg.inv(A @ P @ A.T + R)
x_pred[i] += K @ (x[i] - A @ x_pred[i-1])
return x_pred
# 预测轨迹
x_pred = model(x, y)
# 绘制预测结果
plt.plot(x, y, 'o')
plt.plot(x_pred[:, 0], x_pred[:, 1], 'r-')
plt.show()
这个示例代码使用 Kalman filter 来预测轨迹,并绘制预测结果。
分享 创建了问题
6月9日
创建了问题
6月9日


