运行CDS-SLAM时Current Frame黑屏,并一直waiting for images,一段时间后出现段错误并且没有保存CameraTrajectory.txt
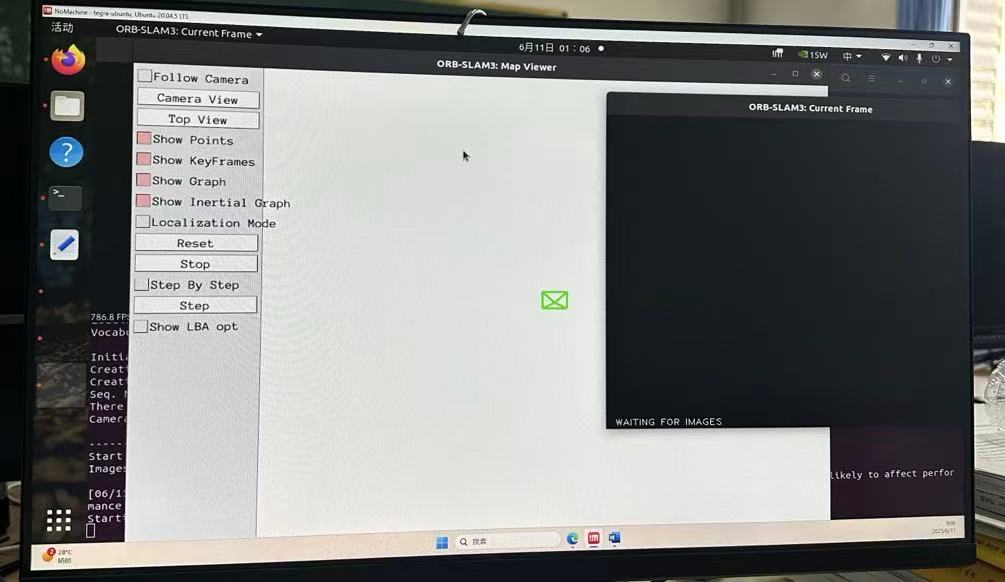
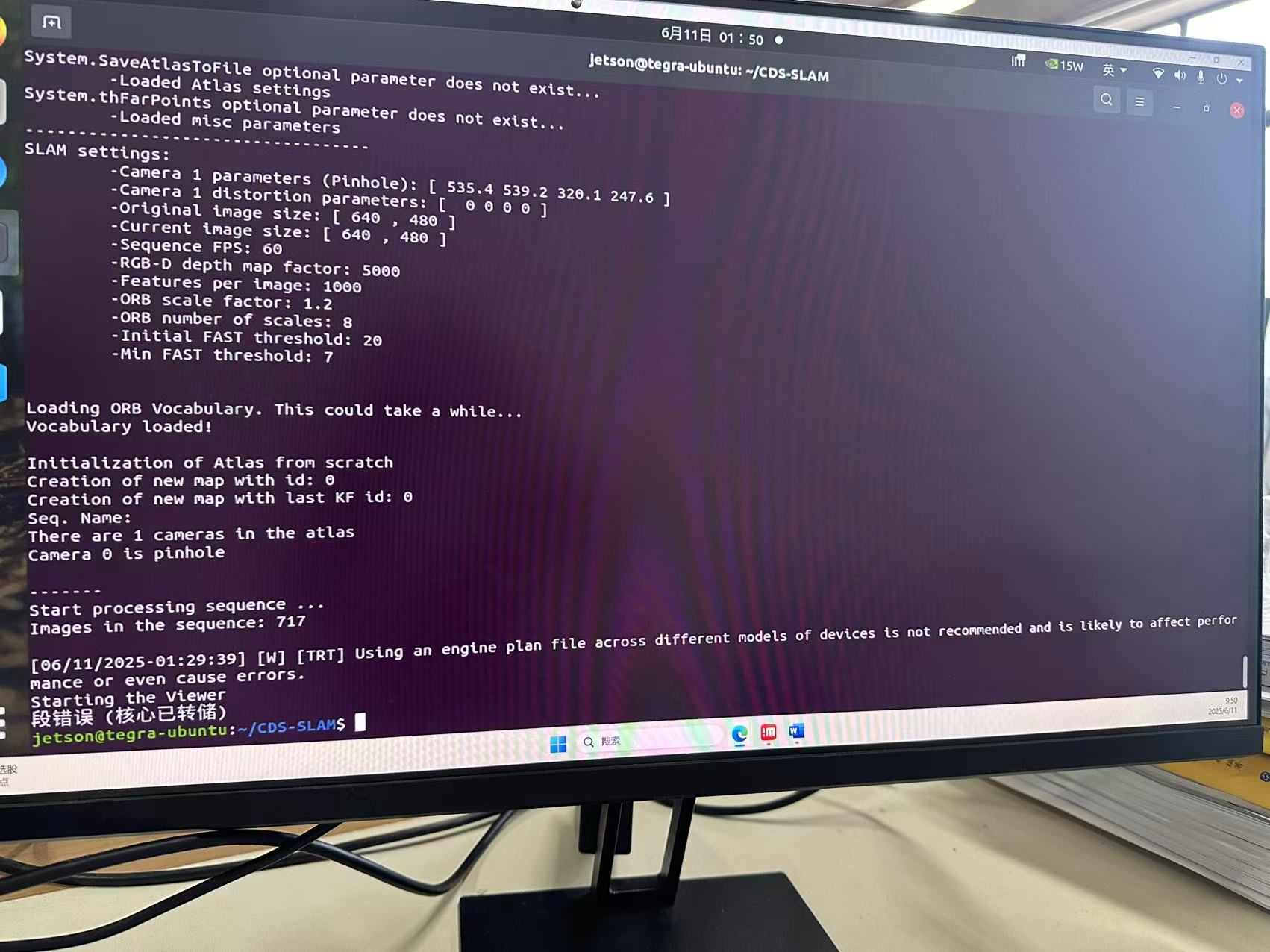

运行CDS-SLAM时Current Frame黑屏,并一直waiting for images,一段时间后出现段错误并且没有保存CameraTrajectory.txt
 分享
分享
上午好☀️☀️☀️️
本答案参考通义千问
根据你的描述,CDS-SLAM 在运行时出现了以下问题:
这些问题可能由多种原因引起,包括配置错误、依赖库缺失或版本不兼容、图像输入问题等。以下是详细的排查和解决步骤:
确保 CDS-SLAM 能够正确接收图像数据。
检查图像路径是否正确:
测试图像输入:
#include <opencv2/opencv.hpp>
int main() {
cv::Mat image = cv::imread("path_to_image.jpg");
if (image.empty()) {
std::cerr << "Error: Could not load image." << std::endl;
return -1;
}
cv::imshow("Image", image);
cv::waitKey(0);
return 0;
}
CDS-SLAM 的运行通常需要一个配置文件(如 config.yaml)。检查配置文件是否正确。
检查相机参数:
检查图像话题或路径:
CDS-SLAM 可能依赖于 OpenCV、Pangolin 或其他库。版本不兼容可能导致段错误。
更新依赖库:
sudo apt-get update
sudo apt-get install libopencv-dev
sudo apt-get install libpangolin-dev
检查动态链接库:
ldd 命令检查可执行文件是否正确链接了依赖库:
ldd cds_slam
段错误通常是由于内存访问越界或空指针引用引起的。
启用调试信息:
-g:
g++ -g -o cds_slam cds_slam.cpp `pkg-config --cflags --libs opencv`
gdb ./cds_slam
run
backtrace
检查指针操作:
如果程序未生成 CameraTrajectory.txt 文件,可能是权限问题或路径错误。
检查输出目录权限:
chmod 755 output_directory
检查输出路径:
std::ofstream trajectory_file("output/CameraTrajectory.txt");
if (!trajectory_file.is_open()) {
std::cerr << "Error: Cannot open file for writing." << std::endl;
return -1;
}
ROS 环境问题:
roscore
rosrun your_package cds_slam_node
多线程问题:
按照以下步骤逐步排查问题:
检查图像输入源:
验证配置文件:
更新依赖库:
调试段错误:
检查文件权限:
检查 ROS 环境:
如果问题仍未解决,请提供更多细节(如配置文件内容、完整日志或代码片段),以便进一步分析。
分享 创建了问题
6月11日
创建了问题
6月11日

