
您好,我有一个一维相位解缠的问题想请教一下
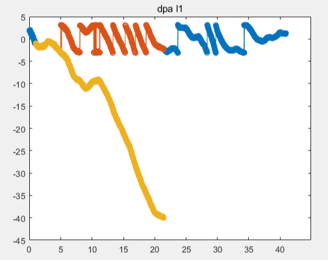
我目前采用matlab自带的unwrap脚本对数据进行了基础相位解缠
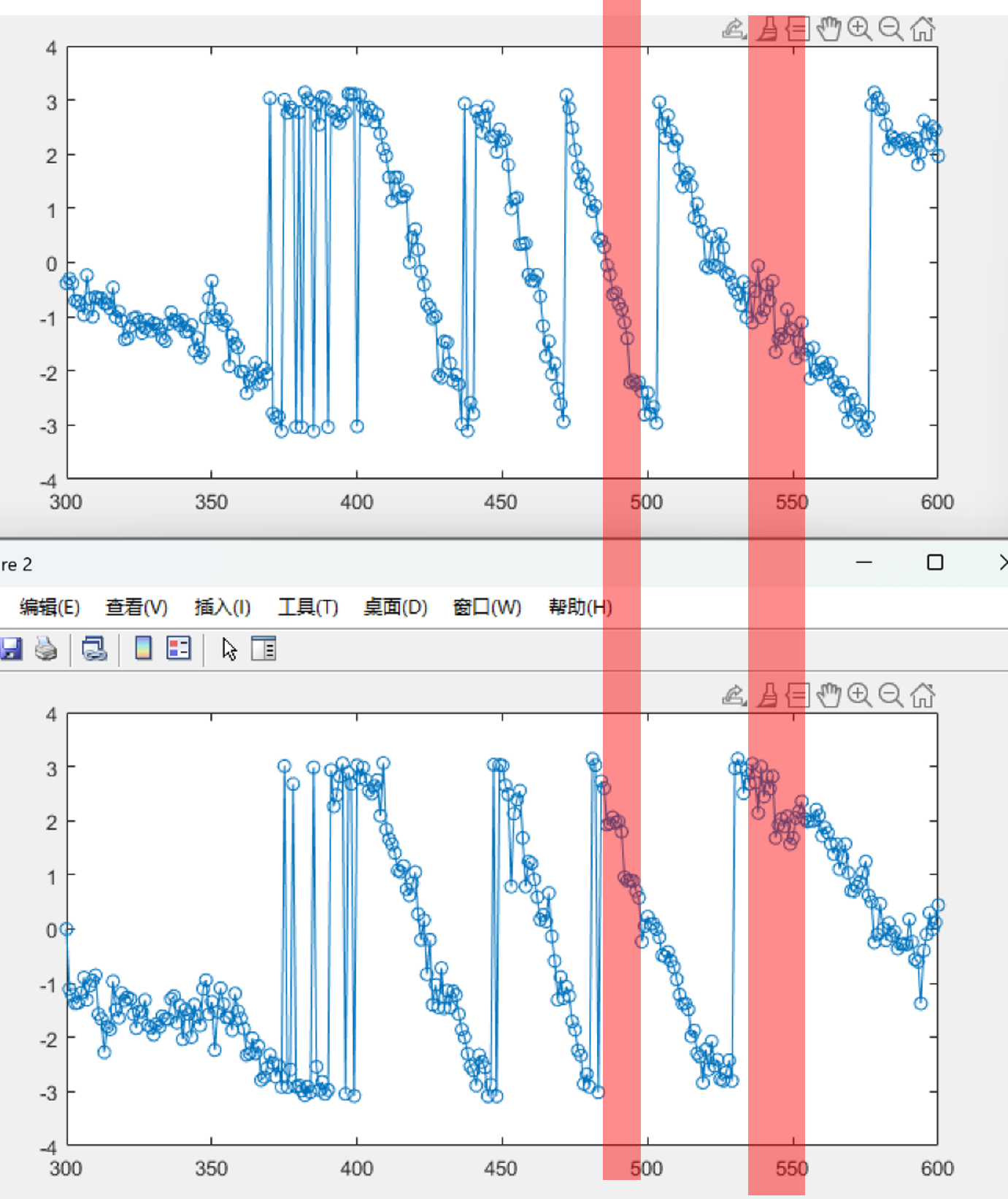
现在想进行进一步处理,一个是降低噪声影响,以及突变对后续解缠的累加影响,一个是我用双频L1和L2信号,他们在一些情况下应该是同步变化的,如下图红色框选区域
想问下您有什么推荐的解缠算法吗?
我目前感觉卡尔曼滤波进行相位解缠可能是一个比较好的方法,您之前csdn里有提到这个算法和代码,是要csdn里订阅您的专栏还是您有什么其他渠道获取?(https://zxljhy.blog.csdn.net/article/details/143990937?fromshare=blogdetail&sharetype=blogdetail&sharerId=143990937&sharerefer=PC&sharesource=zhaoyi_zhang&sharefrom=from_link)






