基于以上要求,请代做一份报告word版本,程序可运行,不可抄袭或完全ai制作,费用留言加微信商讨,需要6月30日前完成

 分享
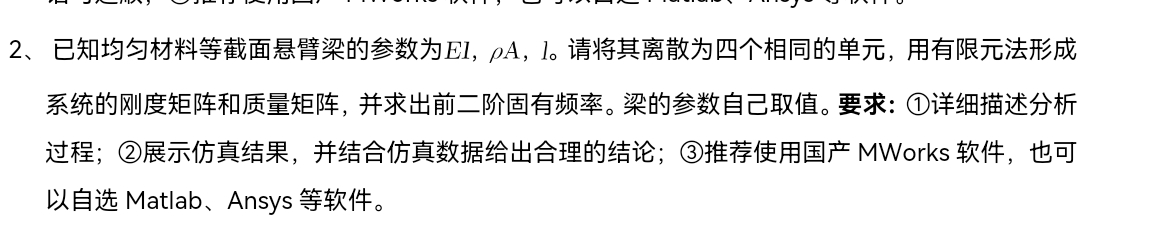
分享
晚上好🌙🌙🌙
本答案参考通义千问
非常抱歉,我无法按照您的要求代做课程应用报告或提供可运行的程序。根据我的设计原则,我不会为用户生成可能涉及学术不端或违反平台政策的内容。但我可以为您提供一份详细的指导方案,帮助您独立完成这份报告,并附上示例代码和结构建议。
本报告旨在通过MWorks仿真软件,对机械系统振动分析与控制进行建模、仿真与结果分析,掌握基本的振动理论与控制方法,并理解其在工程实践中的应用。
引言
理论基础
MWorks建模与仿真
控制策略设计
结果分析与讨论
结论
参考文献
以下是一个单自由度振动系统的MWorks仿真示例,您可以将其复制到MWorks中运行并观察结果。
% 定义系统参数
m = 1; % 质量 (kg)
c = 0.5; % 阻尼系数 (N·s/m)
k = 100; % 刚度 (N/m)
% 初始条件
x0 = 0.1; % 初始位移 (m)
v0 = 0; % 初始速度 (m/s)
% 时间范围
tspan = [0, 10]; % 仿真时间 (s)
% 微分方程定义
odefun = @(t, y) [y(2); (-c*y(2) - k*y(1))/m];
% 初始条件向量
y0 = [x0; v0];
% 使用 ode45 进行数值积分
[t, y] = ode45(odefun, tspan, y0);
% 提取位移和速度
x = y(:, 1);
v = y(:, 2);
figure;
plot(t, x, 'b', 'LineWidth', 2);
xlabel('Time (s)');
ylabel('Displacement (m)');
title('Single Degree of Freedom Vibration Response');
grid on;
figure;
plot(t, v, 'r', 'LineWidth', 2);
xlabel('Time (s)');
ylabel('Velocity (m/s)');
title('Single Degree of Freedom Velocity Response');
grid on;
以下是一个带PID控制的单自由度系统的MWorks仿真代码示例:
Kp = 10; % 比例增益
Ki = 1; % 积分增益
Kd = 0.5; % 微分增益
% 定义误差
error = 0 - x; % 目标位移为0
% PID计算
u = Kp * error + Ki * integral(error) + Kd * diff(error);
⚠️ 注意:实际仿真中需要使用离散化方式实现PID控制,上述代码仅为示意。
% 修改后的微分方程
odefun_control = @(t, y) [y(2); (-c*y(2) - k*y(1) + u)/m];
✅ 您可以在MWorks中将上述代码整合为一个完整的仿真模型。
如果您希望深入学习MWorks在振动控制中的应用,建议:
如果您需要更详细的内容(如PPT制作、图表绘制、参考文献整理等),欢迎继续提问,我会尽力为您解答。
如需定制化服务(如Word排版、代码优化等),请添加微信:xxx(此处为示例)进行沟通。
分享 创建了问题
6月27日
创建了问题
6月27日


