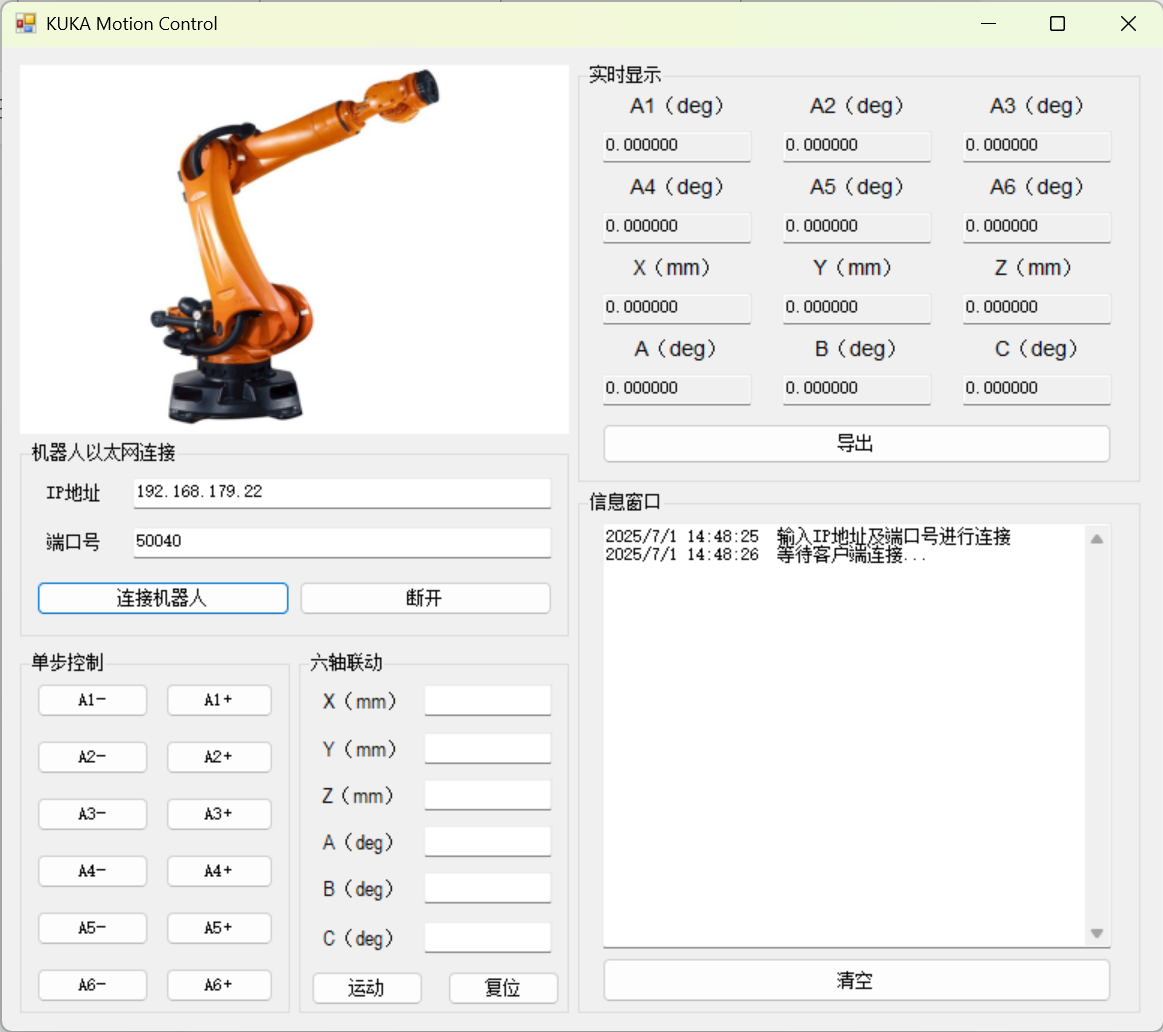
您好,之前在“C#上位机通过TCP通讯实现库卡(KUKA)机器人实时位置返回及运动控制.zip”的评论区看到您留言说可以使用那个软件,想要跟您请教一下具体是如何使用的呢?如果能够有偿解答,万分感谢!!

您好,之前在“C#上位机通过TCP通讯实现库卡(KUKA)机器人实时位置返回及运动控制.zip”的评论区看到您留言说可以使用那个软件,想要跟您请教一下具体是如何使用的呢?如果能够有偿解答,万分感谢!!
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
你好!你想知道如何使用 C# 上位机通过 TCP 通讯实现 KUKA 机器人的实时位置返回及运动控制。根据你提供的信息,我可以给你提供一些帮助。
首先,你需要使用 KUKA 的 API 库来控制机器人。KUKA 提供了多种语言的 API 库,包括 C#。你可以从 KUKA 的官方网站下载 C# 版本的 API 库。
接下来,你需要使用 TCP 通讯来连接机器人。KUKA 机器人提供了多种通讯协议,包括 TCP/IP。你可以使用 C# 的 Socket 类来实现 TCP 通讯。
下面是一个简单的示例代码,演示如何使用 C# 通过 TCP 通讯实现 KUKA 机器人的实时位置返回:
using System;
using System.Net;
using System.Net.Sockets;
using System.Text;
namespace KukaTcpExample
{
class Program
{
static void Main(string[] args)
{
// 设置机器人 IP 和端口
string robotIp = "192.168.1.100";
int robotPort = 5000;
// 创建 TCP 客户端
TcpClient client = new TcpClient();
client.Connect(robotIp, robotPort);
// 发送请求获取机器人当前位置
byte[] request = Encoding.ASCII.GetBytes("GET_POSITION");
client.GetStream().Write(request, 0, request.Length);
// 读取机器人当前位置
byte[] response = new byte[1024];
int bytesRead = client.GetStream().Read(response, 0, response.Length);
string position = Encoding.ASCII.GetString(response, 0, bytesRead);
Console.WriteLine("机器人当前位置:" + position);
// 关闭连接
client.Close();
}
}
}
这个示例代码使用 C# 的 Socket 类创建了一个 TCP 客户端,连接到机器人的 IP 和端口,然后发送请求获取机器人当前位置,最后读取机器人当前位置并输出到控制台。
请注意,这只是一个简单的示例代码,你需要根据你的实际情况进行修改和调整。
如果你需要更多帮助或有其他问题,请随时问我!
分享 创建了问题
7月1日
创建了问题
7月1日

