
#include "stm32f0xx.h"
#include <stdio.h>
#include "main.h"
#include "stm32f0xx_rcc.h"
#include "delay.h"
#include "stm32f0xx_exti.h" // EXTI外设头文件
#include "stm32f0xx_syscfg.h" // SYSCFG头文件(EXTI滤波需要)
// 硬件配置
#define DATA_PIN GPIO_Pin_15 //B 15
#define DATA_PORT GPIOB
// 示波器测量
#define LEAD_CODE_HIGH_US 400
#define LEAD_CODE_LOW_US 14000
#define BIT_HIGH_US 1450
#define BIT_LOW_US 500
// 同步头容差
#define TOLERANCE_MIN 0.9f
#define TOLERANCE_MAX 1.1f
// 定义数据解码状态枚举
typedef enum {
START,
LEAD_CODE_H,
LEAD_CODE_L,
HIGH_BIT,
LOW_BIT,
COMPARE,
} Decode_State_t;
// 全局变量和缓冲区
volatile uint32_t Bit_Count = 0; // 接收数据位计数
volatile uint32_t Received_Data = 0; // 接收到的数据
volatile Decode_State_t RF_Decode_State = START; // 数据解码状态
volatile uint8_t Frame_Ready = 0; // 帧接收完成标志
uint32_t stored_pairing_id = 0; // 存储配对成功的ID
uint8_t collected_digits[3] = {0}; // 收集的数字(百、十、个)
uint8_t digit_count = 0; // 已收集的数字个数
uint32_t last_time = 0; // 上次脉冲时间
uint8_t bit_val = 0; // 收集的值
static uint32_t last_received_id = 0;
static uint8_t last_received_key = 0xB; // 配对模式的按键值
uint32_t H_duration=0; //高电平脉冲宽度
uint32_t L_duration=0; //低电平脉冲宽度
// 定时器初始化,微秒
void TIM_TimeBase_Init(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_InitStruct.TIM_Prescaler = (SystemCoreClock / 1000000) - 1; // 1MHz频率
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStruct.TIM_Period = 0xFFFF;
TIM_TimeBaseInit(TIM3, &TIM_InitStruct);
TIM_Cmd(TIM3, ENABLE);
}
// 初始化接收
void RF_RX_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct;
// 使能时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//这个必须要开启,被卡主了
// 配置DO引脚为输入
GPIO_InitStruct.GPIO_Pin = DATA_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DATA_PORT, &GPIO_InitStruct);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOB, EXTI_PinSource15);
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line = EXTI_Line15;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;//触发 CPU 的中断处理流程
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising_Falling; //双边沿触发
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStruct);
// 配置中断优先级
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = EXTI4_15_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPriority =0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
// 初始化定时器
TIM_TimeBase_Init();
}
//接收到的数据
void print_received_data(uint32_t data, uint32_t bit_count) {
char bin_str[25] = {0};
// 提取24位数据,bit23(MSB)到bit0(LSB)
for (int i = 0; i < 24; i++) {
uint32_t mask = 1UL << (23 - i);
bin_str[i] = (data & mask) ? '1' : '0';
}
printf("Bit[%d]: %s\n", bit_count, bin_str);
}
// 轮询接收函数
void Poll_RF_Receiver(uint16_t current_state) {
uint32_t current_time = TIM_GetCounter(TIM3);
uint32_t duration;
if (current_time < last_time) {
duration = 0xFFFF - last_time + current_time + 1;
} else {
duration = current_time - last_time;
}
last_time = current_time;
switch (RF_Decode_State) {
case START:
if (current_state == 1) {
RF_Decode_State = LEAD_CODE_H;
}
break;
case LEAD_CODE_H:
if (current_state == 0) {
if (duration >= (LEAD_CODE_HIGH_US * TOLERANCE_MIN) && duration <= (LEAD_CODE_HIGH_US * TOLERANCE_MAX)) {
printf("Dur1=%d\n",duration);
RF_Decode_State = LEAD_CODE_L;
} else {
RF_Decode_State = START;
}
}
break;
case LEAD_CODE_L:
if (current_state == 1) {
printf("Dur2=%d\n",duration);
if (duration >= (LEAD_CODE_LOW_US * TOLERANCE_MIN) && duration <= (LEAD_CODE_LOW_US * TOLERANCE_MAX)) {
printf("Dur3=%d\n",duration);
Received_Data = 0;
Bit_Count = 0;
RF_Decode_State = HIGH_BIT;
} else {
RF_Decode_State = LEAD_CODE_H;
}
}
break;
case HIGH_BIT:
if (current_state == 0) {
H_duration = duration;
RF_Decode_State = LOW_BIT;
}
break;
case LOW_BIT:
if (current_state == 1) {
L_duration = duration;
RF_Decode_State = COMPARE;
}
break;
case COMPARE: {
const uint32_t diff = (H_duration > L_duration)
? (H_duration - L_duration)
: (L_duration - H_duration);
if(diff > 50) {
bit_val = (H_duration > L_duration) ? 1 : 0;
// LSB优先接收 (与后续打印一致)
Received_Data = (bit_val << (23 - Bit_Count)) | Received_Data;
Bit_Count++;
if(Bit_Count >= 24) {
Frame_Ready = 1;
print_received_data(Received_Data,Bit_Count);
RF_Decode_State = START;
} else {
RF_Decode_State = HIGH_BIT;
}
} else {
// 微小差异不重置状态机,继续接收
RF_Decode_State = HIGH_BIT;
}
break;
}
}
}
void EXTI4_15_IRQHandler(void) {
static int irq_count = 0;
if (EXTI_GetITStatus(EXTI_Line15) != RESET) {
uint8_t current = GPIO_ReadInputDataBit(DATA_PORT, DATA_PIN);
Poll_RF_Receiver(current);
EXTI_ClearITPendingBit(EXTI_Line15); // 清除中断标志
}
}
上述程序为,轮询接收RF信号的解码曼彻斯特编码的状态机,解码433无线通信
,程序运行后,日志如下
Dur1=439
Dur2=1448
Dur1=424
Dur2=1096
Dur1=432
Dur2=1561
Dur1=440
Dur2=1293
Dur1=360
Dur2=1216
Dur1=413
Dur2=1290
Dur1=382
Dur2=717
Dur1=383
Dur2=1119
Dur1=409
Dur2=1117
Dur1=436
Dur2=1634
Dur1=383
Dur2=1032
Dur1=388
Dur2=1128
Dur1=413
Dur2=939
Dur1=434
Dur2=581
Dur1=439
Dur2=1407
Dur1=433
Dur2=1113
Dur1=429
Dur2=921
Dur1=408
Dur2=913
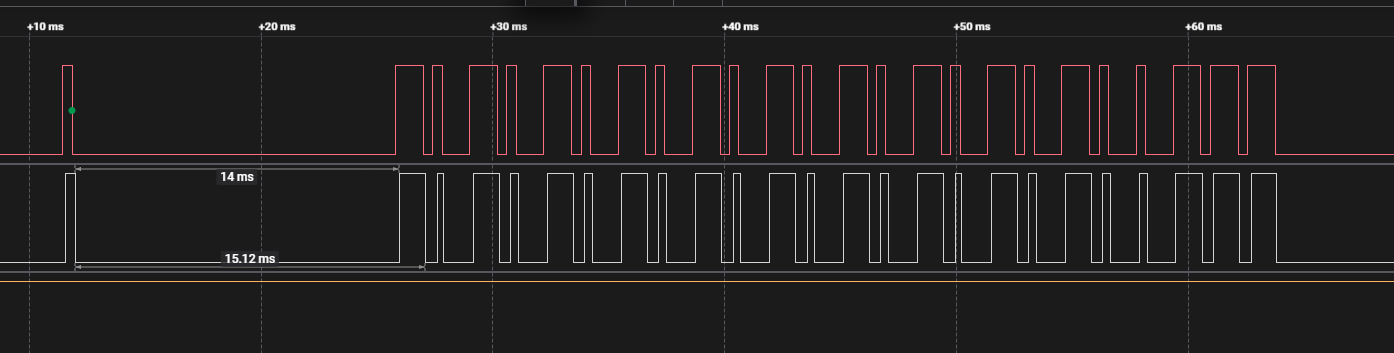
红色为发射的波形,白色为接收的波形。同步码的高电平400可以收到,但是低电平的14000,确一直无法检测到,导致无法解码,使用的单片机为stm32f030,48Mhz,请教一下是什么原因





