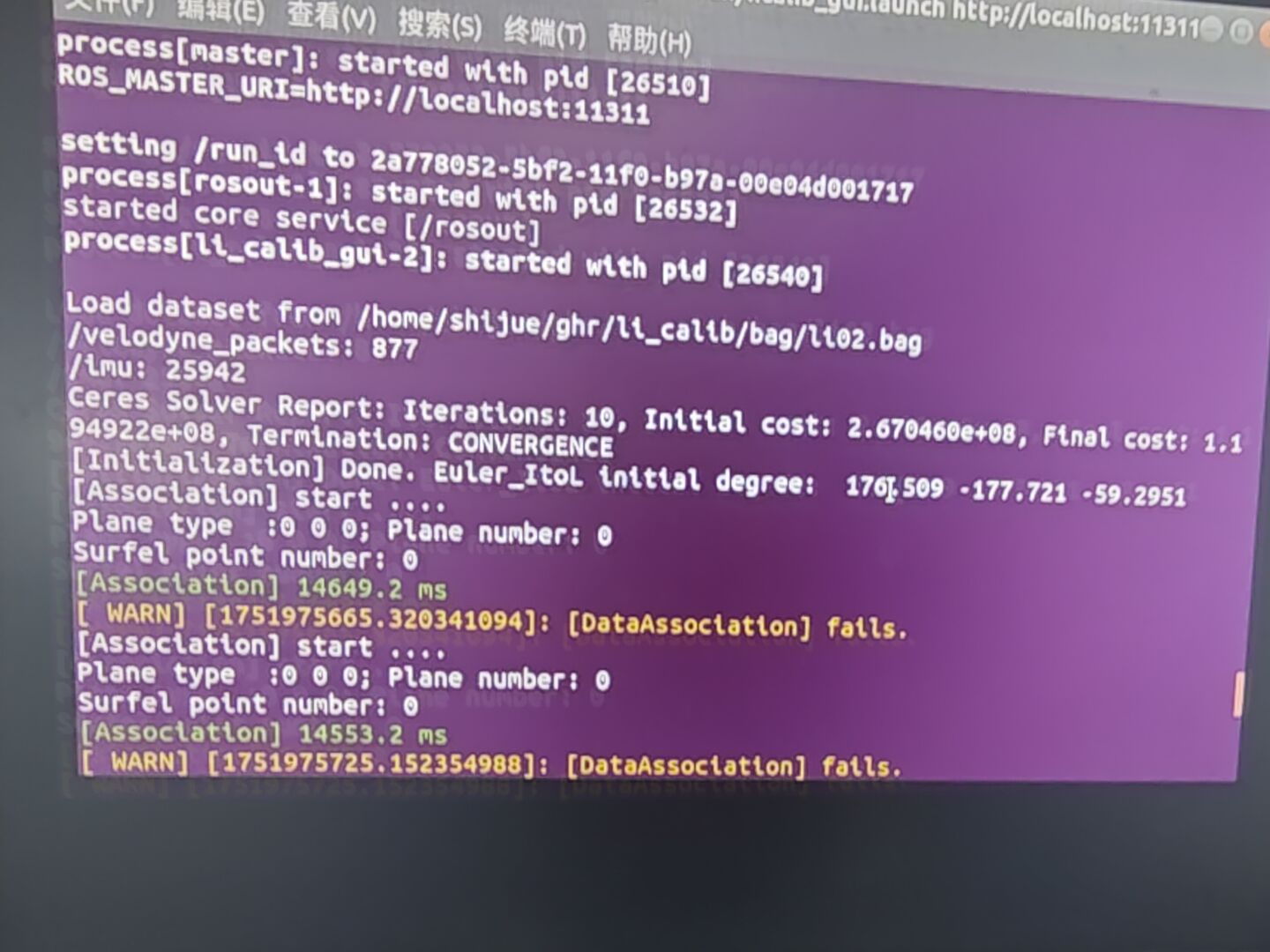
录制完bag进行标定,进行到association步骤显示失败
plane type 0 plane numbers 0。失败
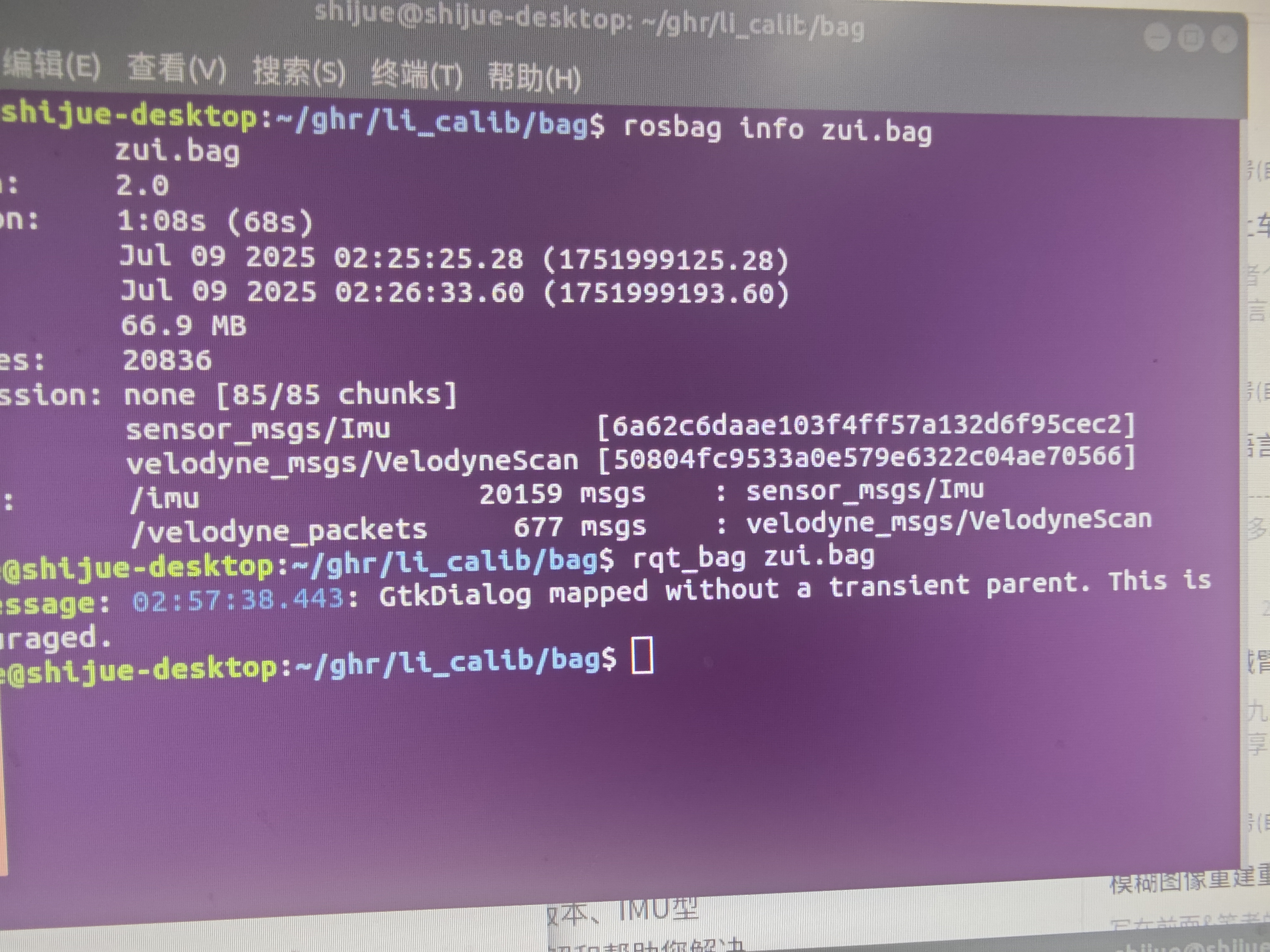
但是用GitHub里数据集正常跑通,下面的图是我录制包的信息
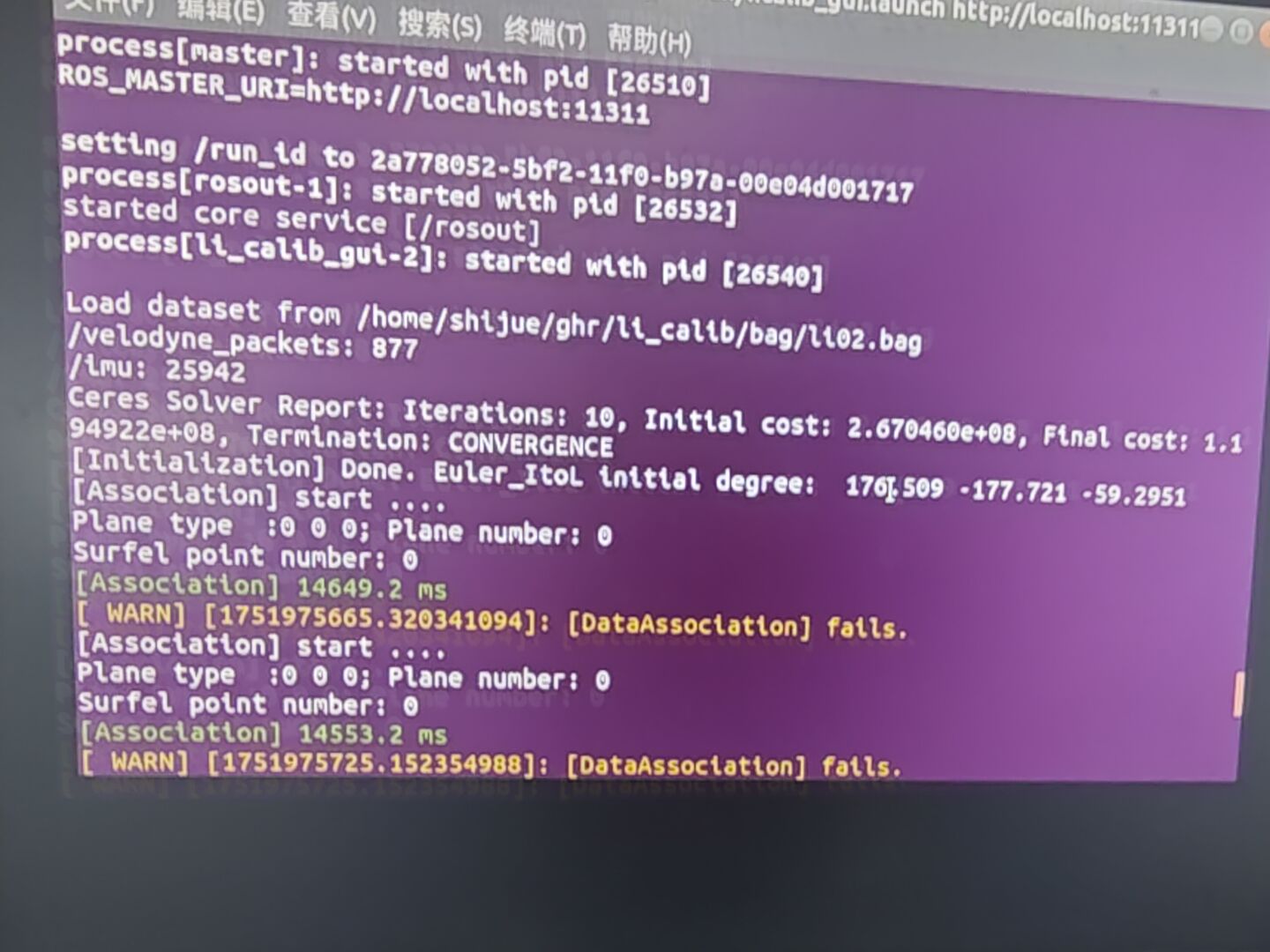

录制完bag进行标定,进行到association步骤显示失败
plane type 0 plane numbers 0。失败
但是用GitHub里数据集正常跑通,下面的图是我录制包的信息
 分享
分享
一杯年华@编程空间帮您解答,本答案结合 ChatGPT4.0和DeepSeek整理
我曾经遇到过类似的问题,当时也是在使用浙大li_calib进行标定时,在association步骤出现了plane相关参数为0且标定失败的情况,结合你的情况,我来分析下并给出解决方案。
从你提供的信息来看,用GitHub里的数据集能正常跑通,但自己录制的bag包不行,这说明问题很可能出在你录制的数据集上。出现“plane type 0、plane numbers 0”这样的错误,大概率是因为你录制的bag包中,点云数据里能被算法识别到的平面特征太少甚至没有,导致关联步骤无法正常进行。
这是因为算法在association步骤主要依赖于从点云数据中提取平面等特征来进行关联计算,而录制环境的好坏直接决定了点云数据中平面特征的数量和质量。
按照这样的方式重新录制bag包后,点云数据中会包含足够多的平面特征,association步骤就能顺利进行,从而解决标定失败的问题。
希望这些方案能帮到你,楼主采纳。如有问题请继续留言。
分享 系统已结题
7月23日
系统已结题
7月23日 已采纳回答
7月15日
创建了问题
7月9日
已采纳回答
7月15日
创建了问题
7月9日


