

我想问问,现在我想要做一个平衡车,我知道了由mpu6050dmp得知的pitch、roll、yaw角度,这个角度和pid串级之间有什么关系呢,代码要怎么写,我自己知道各自之间的关系,他们两者怎么联系起来?还有速度环、直立环,机械中值,这些又怎么看,怎么联系起来(基于标准库)


8条回答 默认 最新

 关注
关注让【宝码香车】来帮你解答,本回答参考DeepSeek编写,并整理提供。
如果还有疑问可以点击头像关注私信或评论。如果答案让您满意,请采纳、点赞、关注,非常感谢!
若您愿意支持,欢迎直接打赏,将不胜感激!
平衡车PID控制与MPU6050姿态角的关系
基本原理
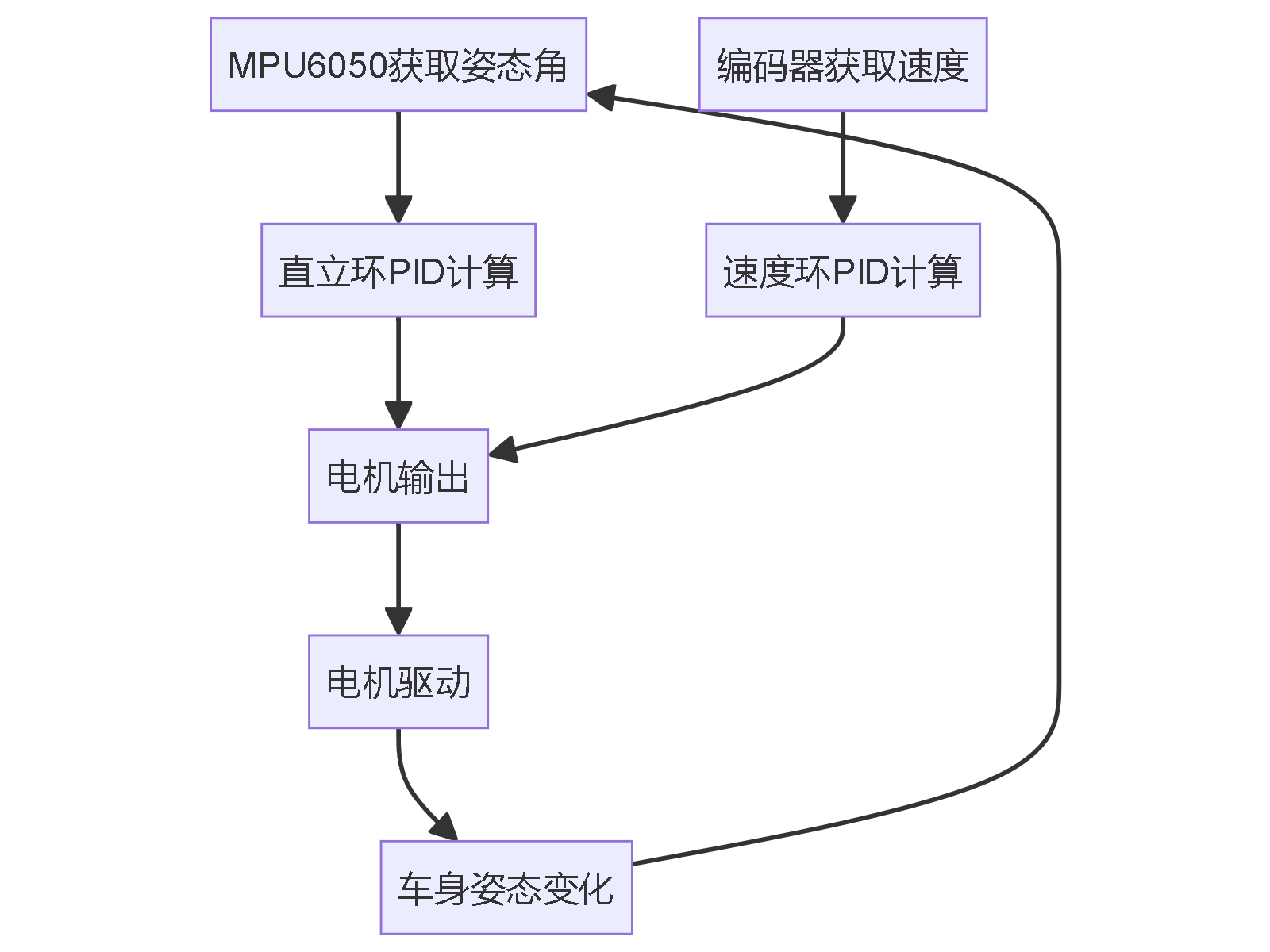
在平衡车系统中,MPU6050提供的姿态角(特别是pitch角)与PID控制密切相关:
- 直立环:使用MPU6050的pitch角作为反馈量,通过PID控制保持车身直立
- 速度环:通过编码器获取电机转速作为反馈量,通过PID控制维持期望速度
- 转向环:使用yaw角或直接通过左右轮差速实现转向控制
控制关系
代码实现框架(基于STM32标准库)
// PID结构体定义 typedef struct { float Kp, Ki, Kd; float error, last_error; float integral, derivative; float output; } PID; // 初始化PID控制器 void PID_Init(PID* pid, float Kp, float Ki, float Kd) { pid->Kp = Kp; pid->Ki = Ki; pid->Kd = Kd; pid->error = pid->last_error = 0; pid->integral = pid->derivative = 0; pid->output = 0; } // PID计算 float PID_Calculate(PID* pid, float setpoint, float feedback) { pid->error = setpoint - feedback; pid->integral += pid->error; pid->derivative = pid->error - pid->last_error; pid->output = pid->Kp * pid->error + pid->Ki * pid->integral + pid->Kd * pid->derivative; pid->last_error = pid->error; return pid->output; } // 主控制循环 void Balance_Control(void) { // 初始化PID控制器 PID angle_pid, speed_pid; PID_Init(&angle_pid, 10.0, 0.0, 0.5); // 直立环参数 PID_Init(&speed_pid, 1.0, 0.01, 0.0); // 速度环参数 float target_angle = 0.0; // 目标平衡角度(机械中值) float target_speed = 0.0; // 目标速度 while(1) { // 1. 读取MPU6050数据 MPU6050_GetData(&pitch, &roll, &yaw); // 2. 读取编码器速度 int16_t left_speed = Encoder_GetSpeed(LEFT_MOTOR); int16_t right_speed = Encoder_GetSpeed(RIGHT_MOTOR); float current_speed = (left_speed + right_speed) / 2.0; // 3. 速度环PID计算 float speed_output = PID_Calculate(&speed_pid, target_speed, current_speed); // 4. 直立环PID计算(将速度环输出作为角度补偿) float angle_output = PID_Calculate(&angle_pid, target_angle + speed_output, pitch); // 5. 电机控制 Motor_SetPWM(LEFT_MOTOR, angle_output); Motor_SetPWM(RIGHT_MOTOR, angle_output); // 延时或等待下一次控制周期 delay_ms(5); } }关键概念解释
- 机械中值:平衡车静止平衡时的角度,需要通过实验测定
- 串级PID:
- 外环(速度环)输出作为内环(直立环)的输入补偿
- 直立环优先级高于速度环
- 参数整定顺序:
- 先调直立环(Kp使车能站住,Kd消除抖动)
- 再调速度环(Ki消除静态误差)
- 最后调转向环
调试建议
- 先用示波器或串口绘图观察姿态角变化
- 单独调试直立环,确保车能基本保持平衡
- 加入速度环时,初始参数要小,避免干扰直立环
- 机械中值需要实际测量,不同安装方式值不同
扩展建议

通过这种分层调试方法,可以逐步构建稳定的平衡车控制系统。
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
分享
- 2025-11-18 01:30Liu Baihua的博客 本文详解GY-521 MPU6050模块在两轮平衡车中的应用,介绍加速度计与陀螺仪的数据融合原理,通过互补滤波和DMP技术实现精准姿态感知,并提供Arduino代码示例与常见问题解决方案,帮助读者掌握嵌入式姿态控制系统的核心...
- 好家伙VCC的博客 这个是全网最详细的STM32项目教学视频。第一篇视频在这里:STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随。
- 2021-05-27 17:46Wu__La的博客 陀螺仪及MPU6050模块介绍3.硬件连接4.MPU60505.软件代码————官方自带库6.软件代码————其他代码7.学习补充(代码看不懂的时候可以来看一下)8.效果展示9.参考链接10.完整版代码链接 1.前言(闲话) 正在准备今年...
- 2025-11-05 19:22算法笑匠的博客 本文解析基于MPU6050陀螺仪实现两轮小车直行控制的技术方案,通过PID闭环调节航向角,结合超声波避障,提升运动稳定性。重点介绍姿态解算、零偏校准、PID参数调试及多传感器融合策略,适用于嵌入式机器人导航开发。
- 2025-06-26 17:16oisflo的博客 MPU6050传感器融合三轴加速度计和陀螺仪数据,采用互补滤波、卡尔曼滤波和四元数等方法进行姿态解算,并介绍了零偏校准、温度补偿等误差处理技术。文章还深入分析了IMU解算中的航向参考问题和卡尔曼滤波的最优估计...
- 2025-12-09 17:53奥利奥Stack的博客 本文深入分析STM32F407结合MPU6050实现姿态解算的可行性,从传感器特性、算法选型到实际性能测试,揭示其在200Hz下以不足100μs完成Madgwick算法、CPU占用率低于5%的真实能力,验证该组合在中低端应用中的高效与可靠...
- 2025-11-18 01:41浮华ya的博客 本文介绍如何使用卡尔曼滤波提升MPU6050姿态检测的稳定性,结合加速度计与陀螺仪数据,有效抑制漂移与噪声。提供可移植的C语言实现代码、关键参数 tuning 方法及常见工程问题解决方案,适用于STM32、Arduino等平台。
- 2022-03-29 23:45桃成蹊2.0的博客 经过上一节的介绍,我们可以读出 MPU6050的加速度传感器和角速度传感器的原始数据。不过这些原始数据,对我们来说,用处不大,我们期望得到的是姿态数据,也就是欧拉角:航向角(yaw)、横滚角(roll)和俯仰角...
- 2025-05-11 08:34Atticus-Orion的博客 软件实现步骤涵盖了MPU6050的初始化与数据读取、姿态解算(互补滤波)、PID控制器设计以及麦克纳姆轮的协同控制。此外,文章还提供了关键优化与调试技巧,如传感器校准、PID参数整定和动态稳定性增强。扩展功能部分...
- 2024-11-19 17:30云伴枫轻舞的博客 平衡小车问题记录~~~~喵
- 没有解决我的问题, 去提问

问题事件
 系统已结题
7月22日
系统已结题
7月22日 已采纳回答
7月14日
已采纳回答
7月14日-
创建了问题
7月10日