ros机器人在自主运行的时候,突然失控,然后就横冲直撞。rviz中的机器人模型也不在静态地图里面了,它模型飞到特别远了。这个问题有时候发生,有时候不发生,发生的时候所处的地点也不同
报错信息如下:
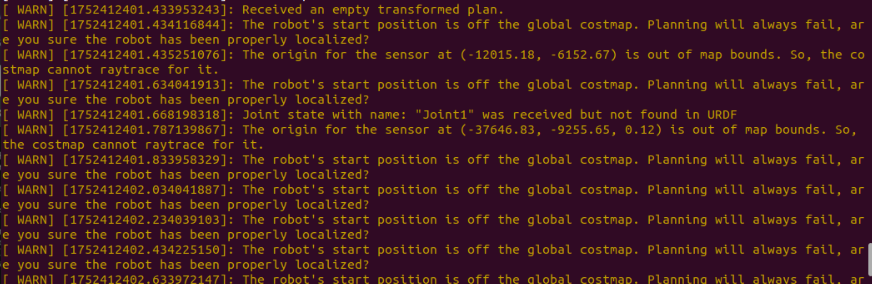

ros机器人在自主运行的时候,突然失控,然后就横冲直撞。rviz中的机器人模型也不在静态地图里面了,它模型飞到特别远了。这个问题有时候发生,有时候不发生,发生的时候所处的地点也不同
报错信息如下:
 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
当ROS机器人在自主运行时突然失控,且RVIZ中的机器人模型飞出静态地图范围,这通常表明定位系统(如AMCL、SLAM)出现了问题,或者是路径规划或控制模块出现异常。以下是详细的原因分析和解决方案。
定位系统(如AMCL)丢失了位置信息
传感器数据异常(如激光雷达、IMU)
地图与实际场景不一致
运动控制模块异常
通信延迟或丢包
硬件问题(如电机、编码器)
检查AMCL的参数:
max_particles足够多,避免粒子滤波失败。odom_alpha1、odom_alpha2等参数以适应机器人的运动特性。<!-- amcl.launch -->
<param name="max_particles" value="2000"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
使用更稳定的初始位置:
initial_pose指定机器人初始位置,避免AMCL重新初始化。rosrun map_server map_saver -f my_map
使用rqt_robot_monitor查看传感器状态:
使用rviz可视化激光雷达数据:
检查传感器驱动是否稳定:
hokuyo_node)没有报错。使用map_server加载最新地图:
rosrun map_server map_server map.yaml
使用map_saver保存最新地图:
rosrun map_server map_saver -f new_map
检查move_base的参数:
planner_frequency和controller_frequency,确保控制频率足够高。<param name="planner_frequency" value="5.0"/>
<param name="controller_frequency" value="20.0"/>
调整PID参数:
p_gain、i_gain、d_gain等参数。使用rostopic list和rosnode list检查通信链路:
/odom, /scan, /cmd_vel)都在正常发布。使用rqt_graph查看节点连接关系:
检查网络延迟:
检查电机和编码器:
检查电源稳定性:
使用rosbag记录日志:
rosbag record /odom /scan /cmd_vel /amcl_pose
使用rqt_console和rqt_logger_level查看错误日志:
手动测试机器人运动:
teleop手动控制机器人,确认运动控制是否正常。rosrun teleop_twist_keyboard teleop_twist_keyboard.py
<launch>
<node name="amcl" pkg="amcl" type="amcl" output="screen">
<param name="use_odom" value="true"/>
<param name="use_map" value="true"/>
<param name="max_particles" value="2000"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="odom_alpha5" value="0.0"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="initial_pose_x" value="0.0"/>
<param name="initial_pose_y" value="0.0"/>
<param name="initial_pose_a" value="0.0"/>
</node>
</launch>
| 问题 | 解决方案 |
|------|----------|
| 定位系统丢失 | 调整AMCL参数,使用稳定初始位置 |
| 传感器数据异常 | 检查传感器驱动和数据流 |
| 地图不一致 | 更新地图并确保与实际环境匹配 |
| 控制参数异常 | 调整move_base和PID参数 |
| 通信问题 | 检查ROS节点和话题连接 |
| 硬件问题 | 检查电机、编码器和电源 |
如果问题仍然存在,建议录制一段rosbag日志,并提供具体报错信息,以便进一步排查。
分享 创建了问题
7月13日
创建了问题
7月13日


