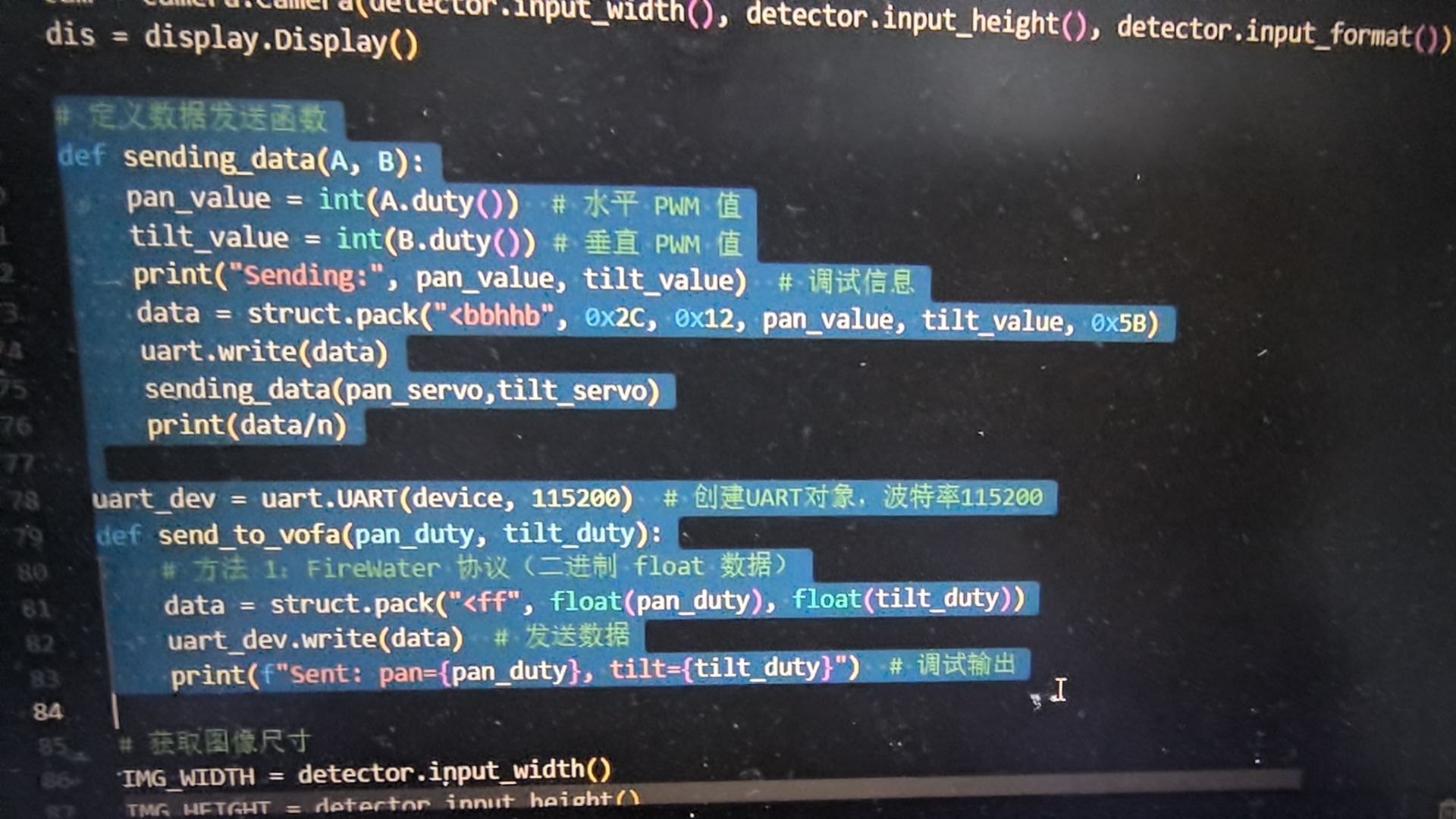
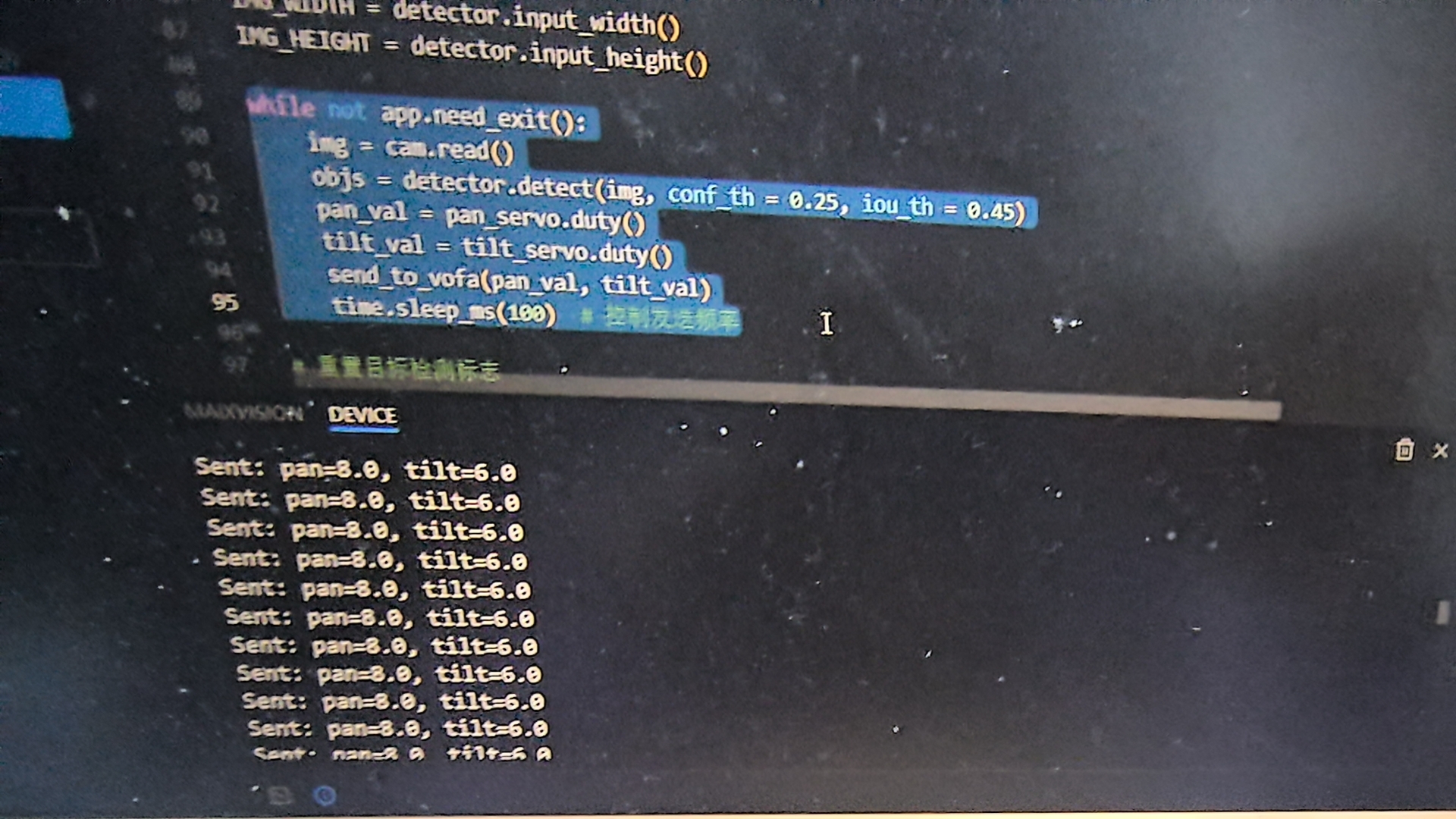
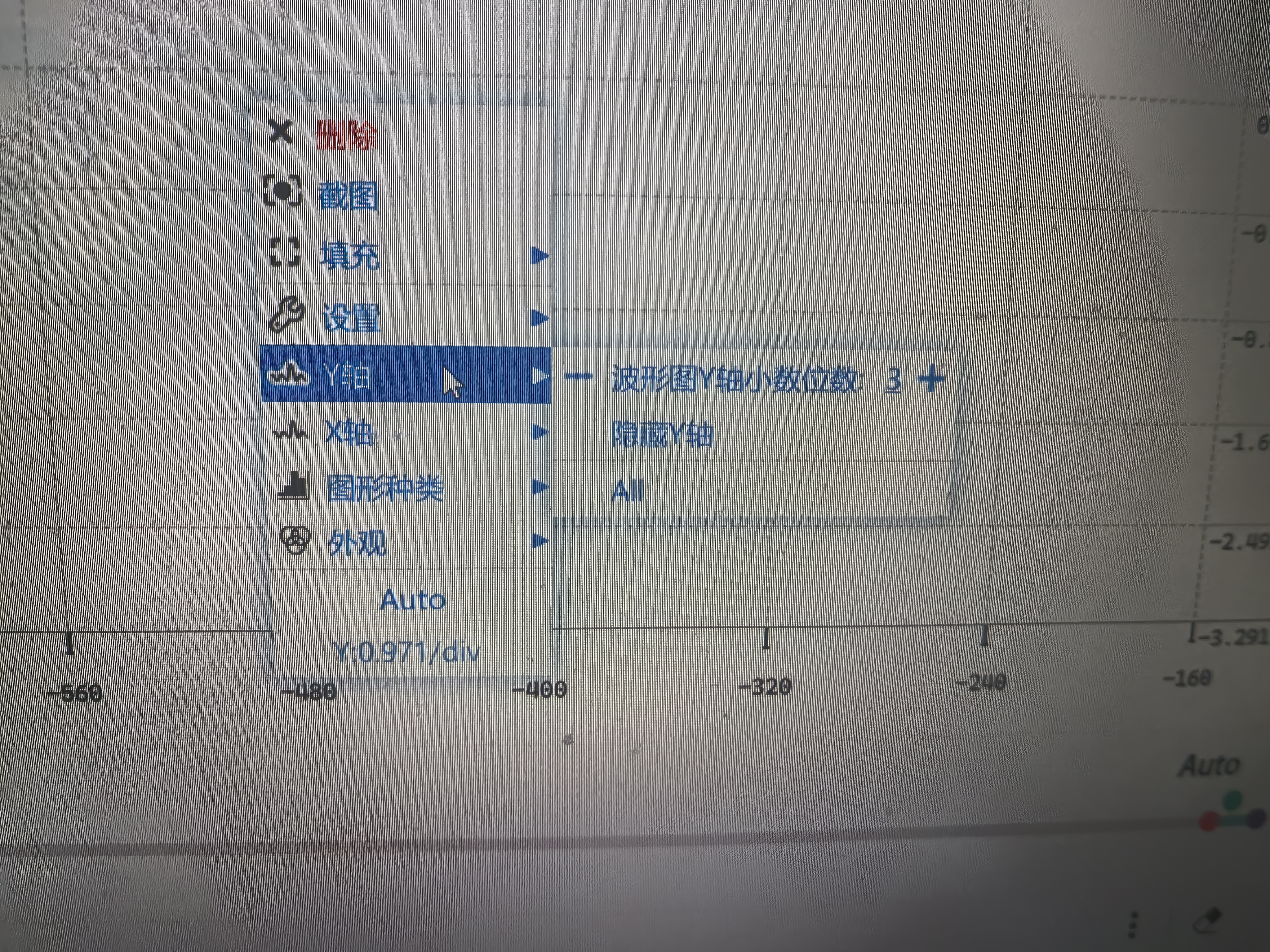
在maixcam上代码可以正常运行且舵机也可以被正常驱动,但是在vofa上无法查看到y轴通道。

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
在使用 MaixCam(基于K210芯片的开发板)时,将舵机控制信号和 MaixCam 的输出波形打印到 VOFA+ 上,是一个常见的调试手段。你提到代码可以在 MaixCam 上正常运行且舵机可以被驱动,但在 VOFA+ 上无法看到 y 轴通道的数据,这可能涉及以下几个方面的问题:
115200 或 9600from machine import UART
# 初始化串口,假设使用 UART0(默认)
uart = UART(UART.UART0, baudrate=115200, bits=8, parity=None, stop=1)
注意: 如果使用的是其他串口,请根据实际硬件连接调整。
import time
while True:
# 模拟舵机控制信号(例如角度)
servo_angle = 90 # 示例值
# 模拟图像数据(例如目标中心点坐标)
x = 160
y = 120
# 发送数据到串口,格式如 "angle:x:y"
data = f"{servo_angle}:{x}:{y}\n"
uart.write(data)
time.sleep(0.1)
重点: 使用
\n结尾确保 VOFA+ 可以识别每行数据。
angle)y)x 或其他信息关键步骤:
: 或 ,,确保与发送数据格式一致。print("Sending:", data)
from machine import UART
import time
# 初始化串口
uart = UART(UART.UART0, baudrate=115200, bits=8, parity=None, stop=1)
# 模拟舵机角度和图像坐标
servo_angle = 90
x = 160
y = 120
try:
while True:
# 构造数据包(格式:angle:x:y)
data = f"{servo_angle}:{x}:{y}\n"
uart.write(data)
print("Sent:", data) # 调试用
time.sleep(0.1)
except KeyboardInterrupt:
pass
| 问题 | 可能原因 | 解决方法 | |------|----------|----------| | 无法看到 Y 轴 | 未正确配置 VOFA+ 的 Y 轴通道 | 检查 VOFA+ 的通道设置,确保 Y 轴对应正确列 | | 数据乱码 | 串口参数不一致 | 确认 MaixCam 和 VOFA+ 的串口参数一致 | | 数据不更新 | 未持续发送数据 | 确保在循环中持续发送数据 |
要让 VOFA+ 显示 MaixCam 的舵机控制信号和图像数据,你需要:
angle:x:y);如果仍然无法显示 Y 轴,请提供你的 VOFA+ 配置截图和发送数据的格式,我可以进一步帮你分析。
分享 创建了问题
7月15日
创建了问题
7月15日


