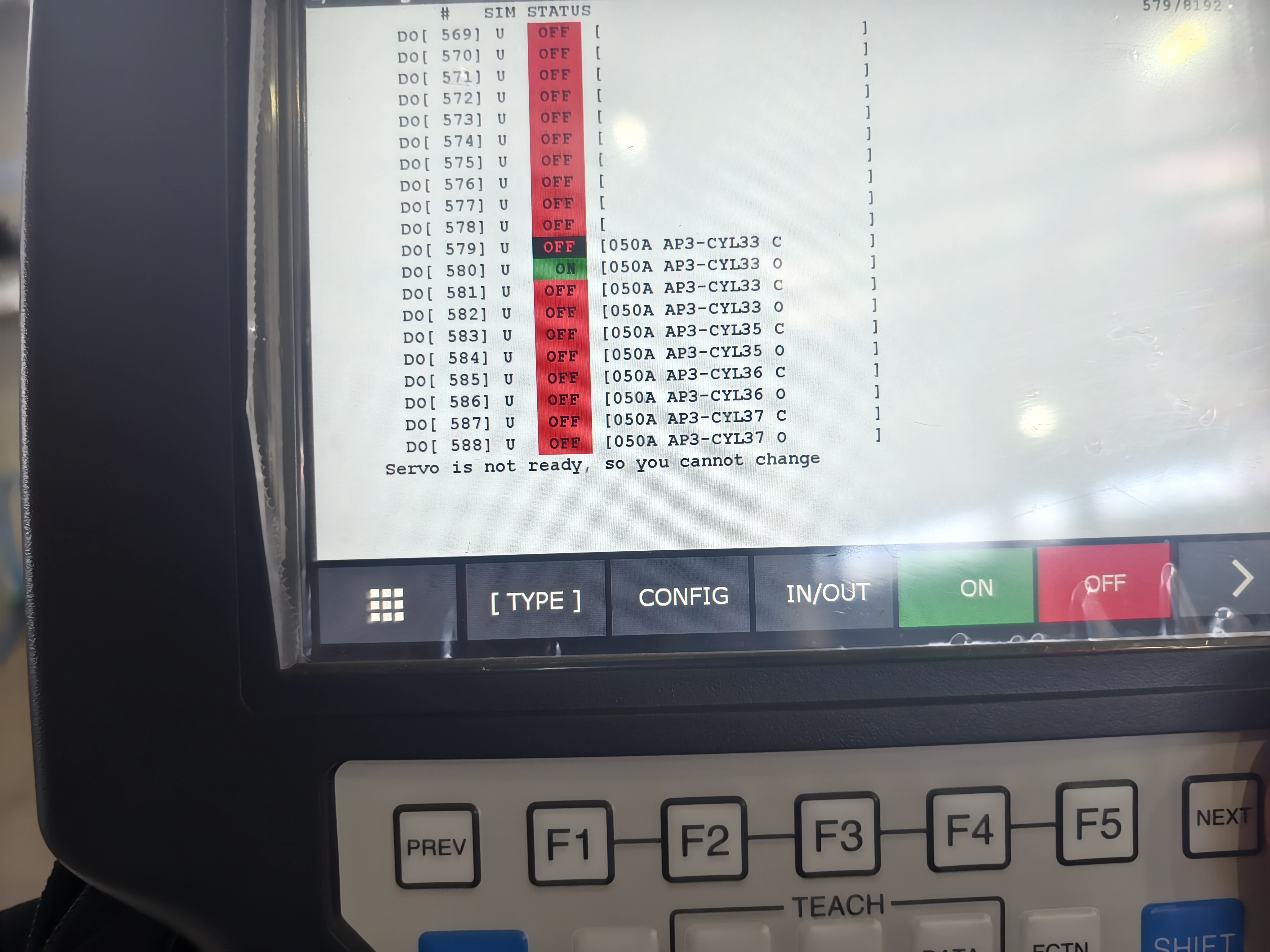
发那科机器人手动控制DO给ON以及OFF时没用且提示伺服未准备好是什么原因?
这边机器人做主控制抓手气缸

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
在使用**发那科机器人(FANUC)**进行 DO(数字输出)控制 时,如果手动控制 DO 为 ON 或 OFF 没有响应,并提示 “伺服未准备好”(Servo Not Ready),这通常与以下几个关键因素有关:
M20 命令)。M20 启动伺服。; 启动伺服
M20
; 设置 DO[01] 为 ON
DO[01] = 1
; 延时一段时间
WAIT 1.0
; 设置 DO[01] 为 OFF
DO[01] = 0
确认机器人处于手动模式
启动伺服电源
M20 或按下操作面板上的 Servo ON 按钮。检查 DO 配置
编写并测试 DO 控制程序
; 启动伺服
M20
; 设置 DO[01] 为 ON
DO[01] = 1
; 延时 1 秒
WAIT 1.0
; 设置 DO[01] 为 OFF
DO[01] = 0
检查外部设备连接
查看报警信息
| 报警号 | 含义 | |--------|------| | ALM 1001 | 伺服未准备好 | | ALM 1002 | 伺服电源未接通 | | ALM 1003 | 机器人正在运行 |
重点总结:
- 必须先启动伺服电源(M20)才能控制 DO。
- DO 信号必须正确配置,否则无法输出。
- 机器人必须处于手动模式,才能手动控制 DO。
- 程序逻辑需合理,确保 DO 控制在伺服启动后执行。
如果你能提供具体的报警号或程序代码,我可以进一步帮你定位问题。
分享 创建了问题
7月21日
创建了问题
7月21日


