
陆探一号两景A星条带模式1的数据,同轨,时间基线112天,同极化HH。使用ENVI56版本和SARscape61版本进行处理,工具是insar dem workflow,也尝试了phase progressing的分步骤进行,效果也是一样的不对。求原因和改进。
下面是我的步骤
1基线估算

2读取数据并进行干涉计算
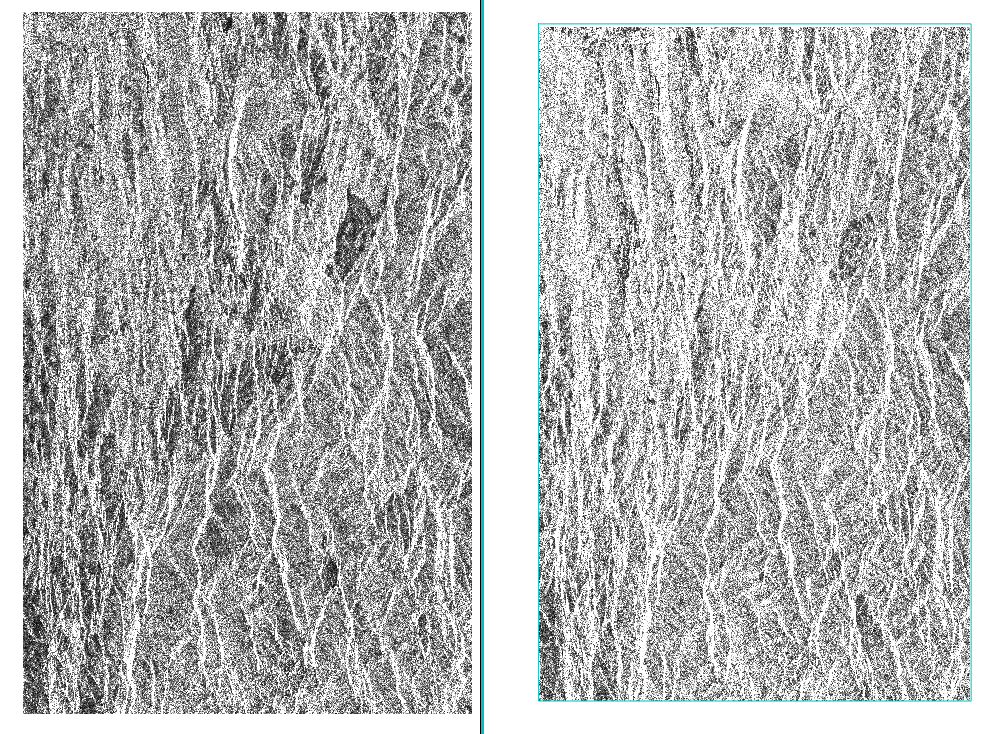
左右图是两景同轨数据
3相干图计算和滤波
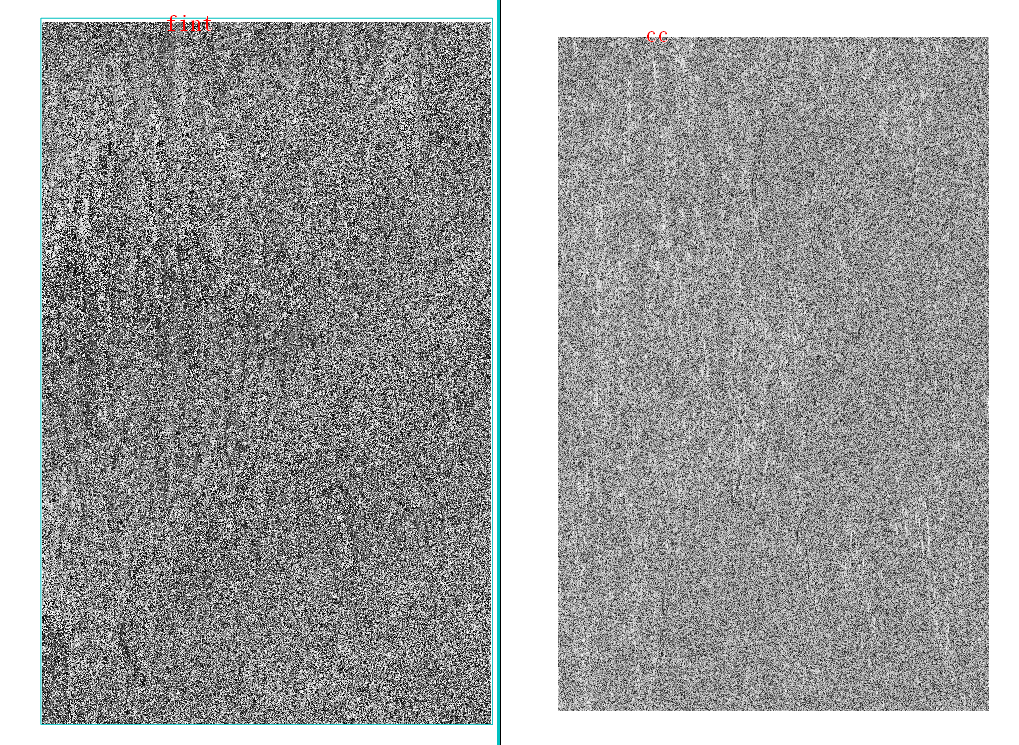
左图是滤波后,右图是_cc图
4相位解缠,精轨与去平
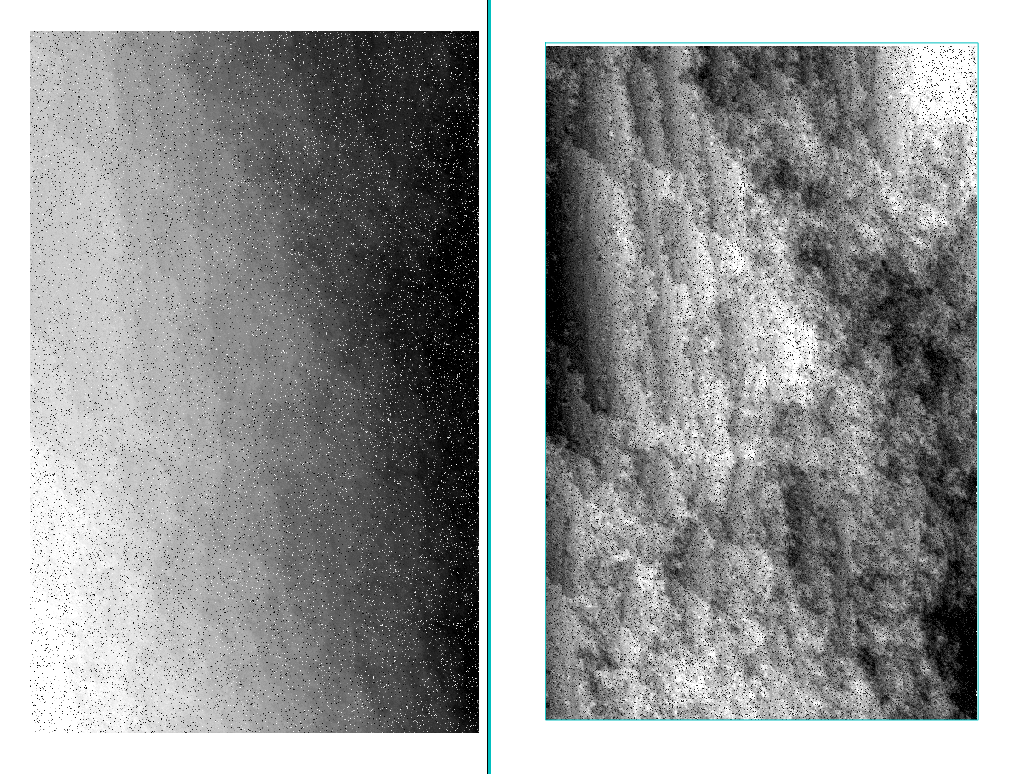
左边是解缠后upha,右边是精轨去平后的_reflat_upha
5相位转高程并地理编码(!)
这步出来之后的dem效果很差
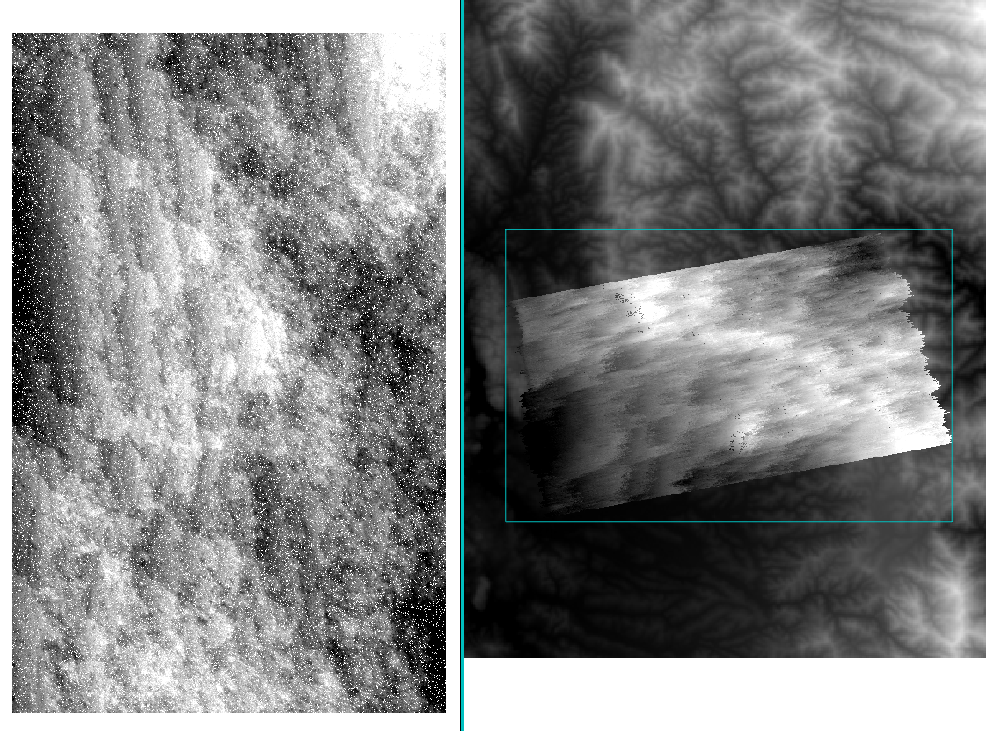
右图是转高程且地理编码后的dem,叠在输入的srtm-3dem数据上
这两个数据很明显差距很大,反演的dem有很明显的横向拉扯的条纹。解缠图上也是有团雾装的云纹,想知道是哪一步出了问题。
自查如下:1._CC图计算均值为0.58而且相干图上有跟实际地貌类似的竖向山脉线,我感觉相干性还可以。2.是否Insar workflow之前两景数据需要进行配准?看有的教程有这一步,有的教程没有。3.陆探一号数据的精轨数据怎么获取?和这个是否有关?4解缠图跟教程上的也有偏差,看不懂太抽象了,想知道这解缠图是否是对的,问题是出在解缠还是转高程,还是相干?我该怎么改进?5会不会跟同轨数据有关😰之所以用同轨是因为异轨数据不能一景完全覆盖研究区,刚好卡死角上了。 6不会陆探数据做出来就是这样的吧?







