我在由FreeRTOS管理的项目中添加了一段新的代码后发现can2进不了接受中断了,但是can1正常
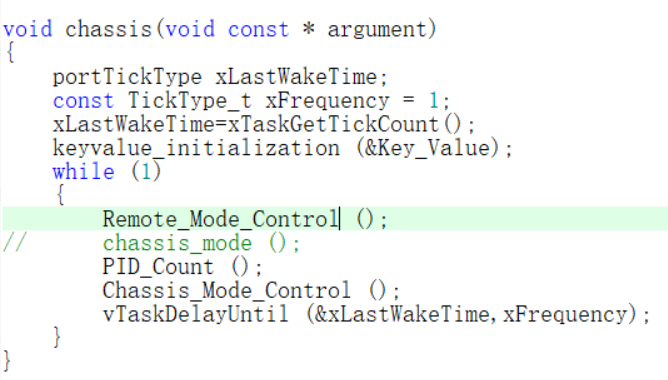
这是新添加的代码所在的任务函数(该任务优先级最高)
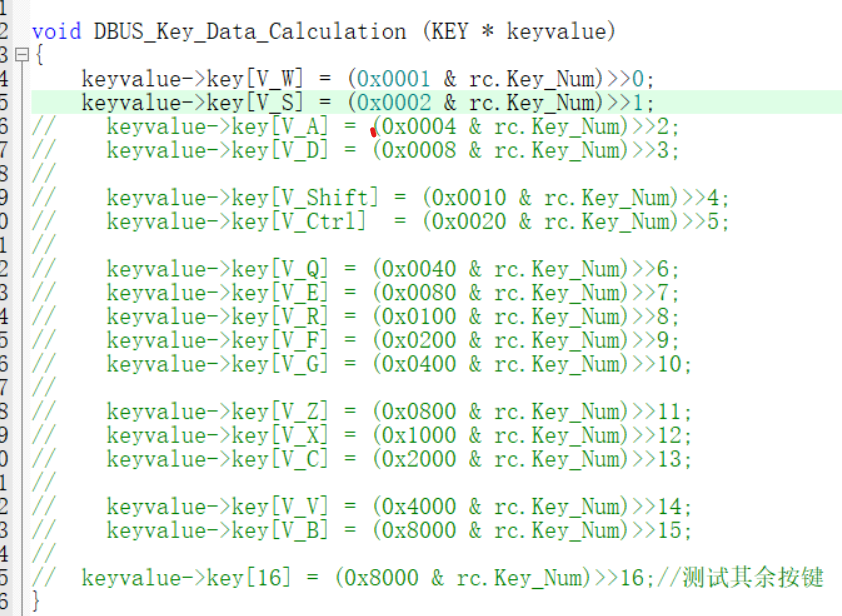
这是新添加的代码片段(在Remote_Mode_Control ()函数里调用)新添加的代码是用来解算DBUS传回来的数据的
而且我发现了只要我只解算2个及以下的数据can2就能进接受中断,高于就不行
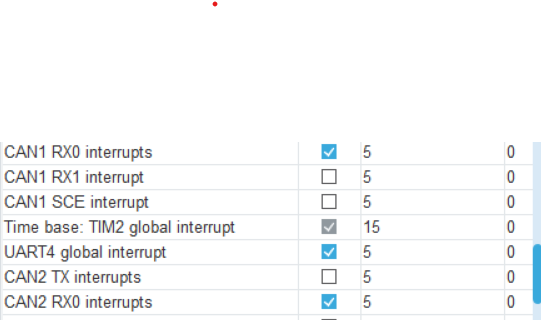
附中断优先级
求解答

我在由FreeRTOS管理的项目中添加了一段新的代码后发现can2进不了接受中断了,但是can1正常
 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
在使用 FreeRTOS 的项目中,添加新代码后导致 CAN2 接收中断无法正常进入,而 CAN1 正常,这是一个典型的 中断优先级冲突、任务抢占或资源竞争问题。结合你提供的信息(如“只解算2个及以下的数据可以进中断,高于就不行”),我们可以推测出可能的原因和解决方法。
configMAX_SYSCALL_INTERRUPT_PRIORITY)。configMAX_SYSCALL_INTERRUPT_PRIORITY 来限制任务对中断的抢占。注意: 在 STM32 中,中断优先级分为 抢占优先级(preemption priority) 和 子优先级(subpriority),需确保 CAN2 的中断优先级高于任务优先级。
NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 0x0F); // 设置 CAN1 中断优先级
NVIC_SetPriority(CAN2_RX0_IRQn, 0x0E); // 设置 CAN2 中断优先级
重点: 如果 CAN2 的中断优先级低于任务优先级,会导致中断无法及时响应。
CAN_ITConfig(CAN2, CAN_IT_RX_FIFO0_MSG_PEND, ENABLE);
// 延迟一段时间,让出 CPU
vTaskDelay(pdMS_TO_TICKS(1));
xSemaphoreTake(mutex, portMAX_DELAY);
// 修改共享资源
xSemaphoreGive(mutex);
#define TASK_STACK_SIZE 512
建议: 使用调试工具(如 ST-Link、J-Link)查看堆栈使用情况。
假设你有一个高优先级任务 Remote_Mode_Control(),你可以对其进行优化,避免长时间占用 CPU:
void Remote_Mode_Control(void *pvParameters)
{
while (1)
{
// 解算 DBUS 数据
int data_count = 0;
while (data_count < MAX_DATA && /* 数据可用 */)
{
// 解算一个数据
process_dbus_data(data_buffer[data_count]);
data_count++;
// 每处理一个数据,让出 CPU
vTaskDelay(pdMS_TO_TICKS(1));
}
// 其他逻辑...
}
}
重点: 每次处理完一个数据后调用 vTaskDelay(),避免长时间占用 CPU。
| 问题原因 | 解决方案 | |----------|----------| | 任务优先级过高 | 调整任务优先级,确保不干扰中断 | | 中断优先级配置错误 | 检查并重新配置 CAN2 中断优先级 | | 任务执行时间过长 | 优化算法,使用 vTaskDelay() 让出 CPU | | 共享资源未加锁 | 使用 xSemaphoreTake/xSemaphoreGive 保护资源 | | 堆栈溢出 | 检查并增加任务堆栈大小 |
如果你愿意提供具体的代码片段(如 CAN 初始化、任务函数、中断配置等),我可以进一步帮你分析和修复问题。
分享 创建了问题
7月26日
创建了问题
7月26日


