下午好🌅🌅🌅
本答案参考通义千问
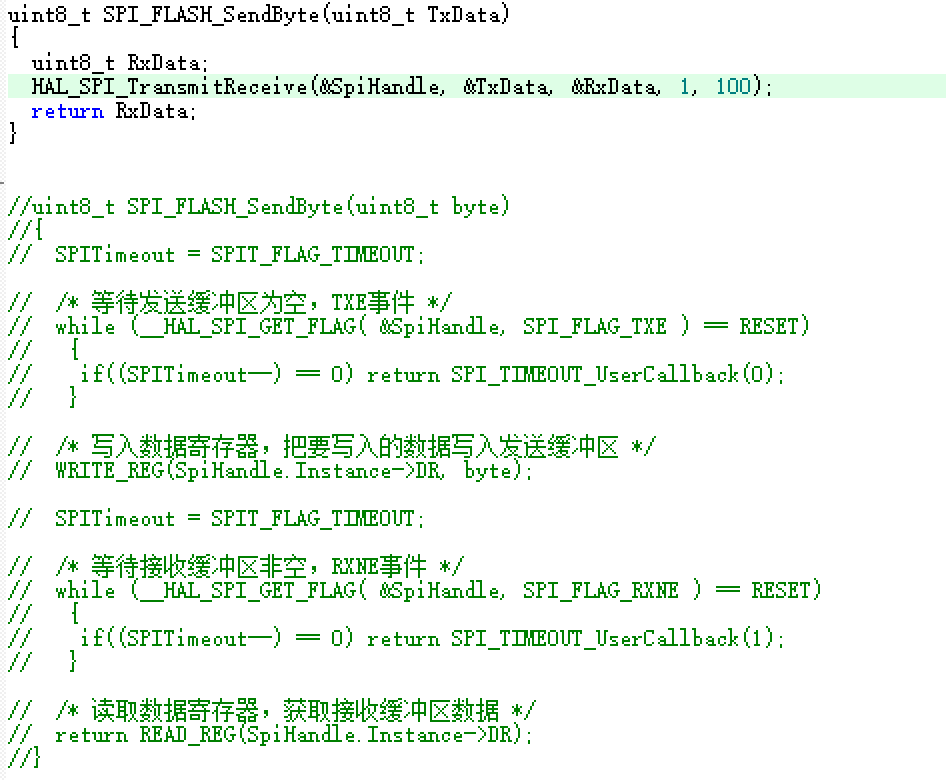
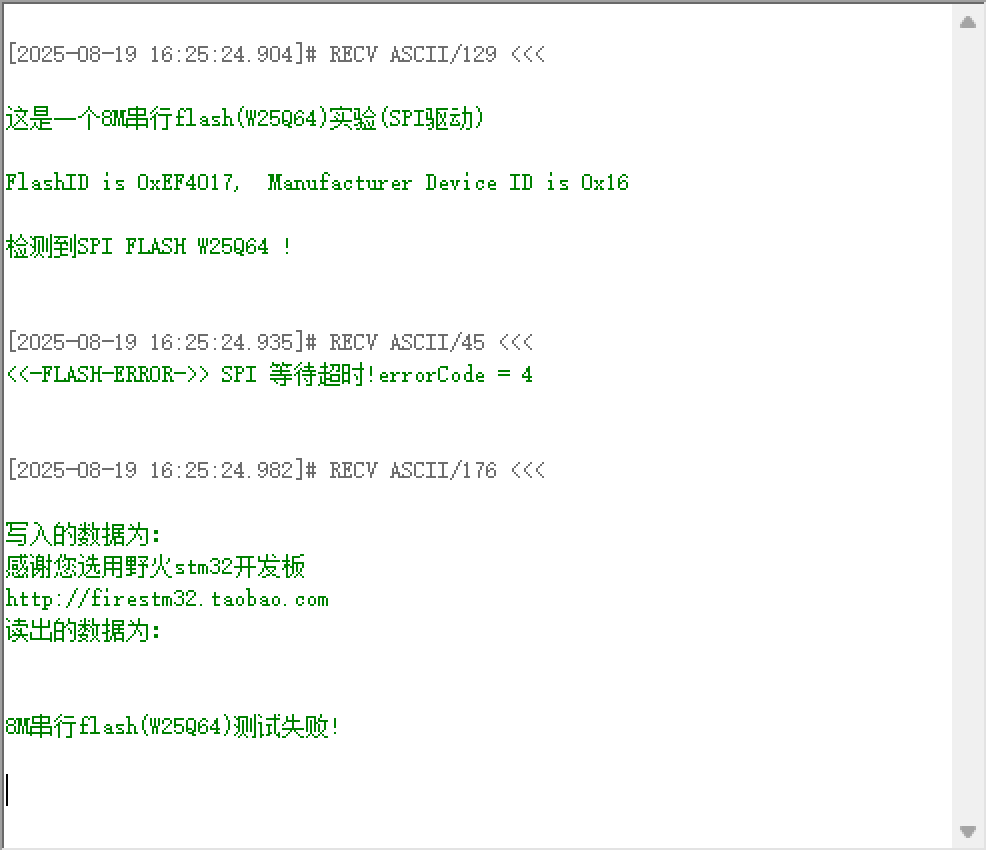
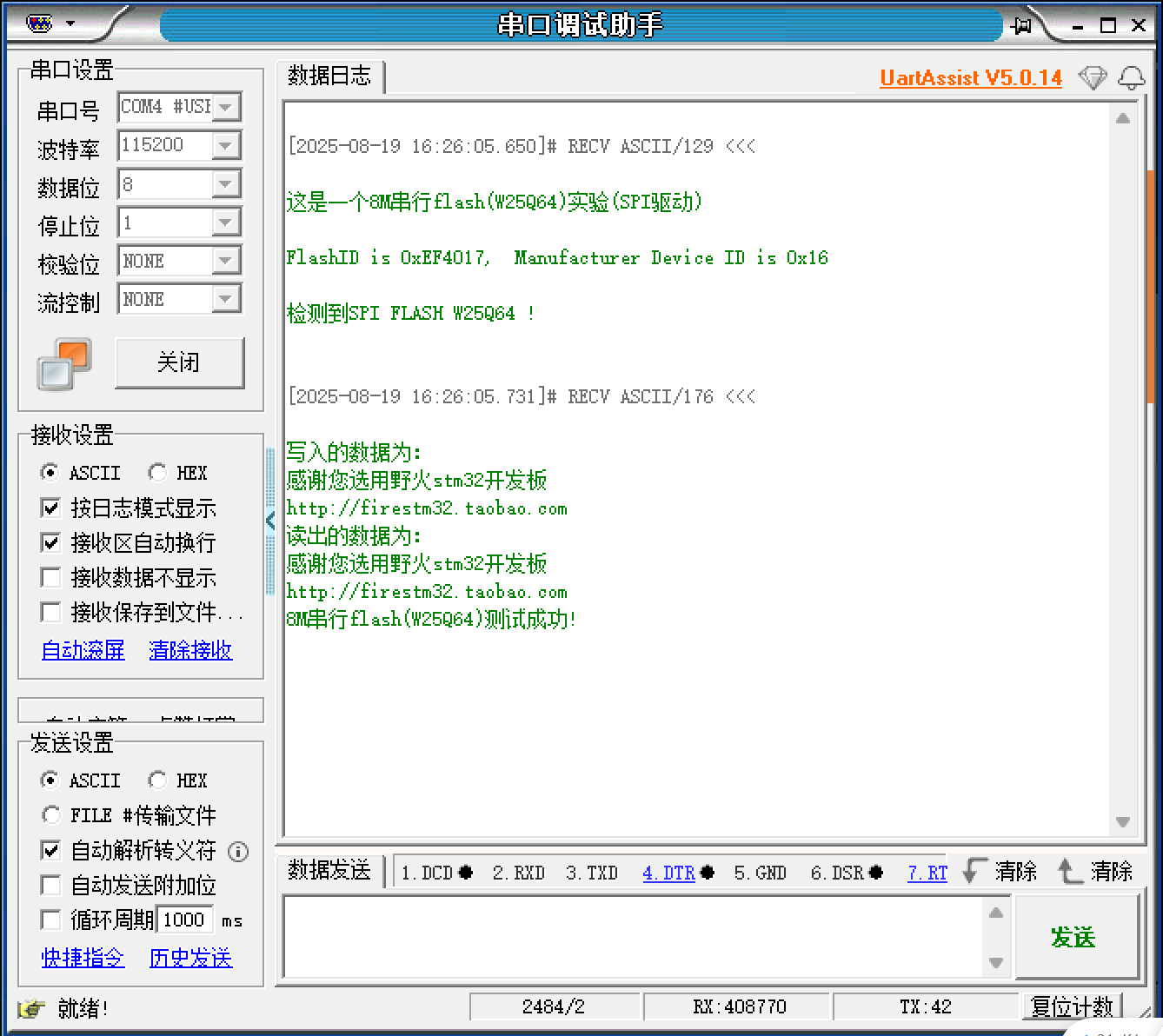
你提到的问题是关于 HAL库的 HAL_SPI_TransmitReceive() 函数 与 寄存器级别的 SPI 控制方式 在功能上不一致,导致发送数据结果不一致。这在嵌入式开发中是比较常见的问题,原因可能涉及以下几个方面:
✅ 问题分析
1. 函数使用方式不同
- 寄存器方式:直接操作 SPI 的寄存器(如
SPIx->DR),通过手动控制 SPI 状态(如 SPI_I2S_GetFlagStatus(SPIx, SPI_FLAG_TXE))来判断是否可以发送下一个字节。 - HAL 库方式:使用
HAL_SPI_TransmitReceive() 是一个阻塞函数,会等待传输完成才返回。如果使用不当,可能会出现 超时、未正确配置或未正确处理中断/状态。
2. SPI 模式设置错误
HAL 库中需要确保以下配置一致:
- SPI 模式(主/从)
- 数据帧格式(8位/16位)
- 时钟极性(CPOL)和相位(CPHA)
- 方向(全双工/半双工)
如果这些参数与实际硬件(如 W25Q64)不匹配,会导致通信失败。
3. DMA 或中断未启用
如果你使用的是 HAL_SPI_TransmitReceive(),但没有启用 DMA 或中断,那么该函数将 阻塞等待,直到传输完成。如果在某些情况下(如 SPI 处于忙状态),可能导致程序卡死或数据未正确发送。
4. 数据长度或地址设置错误
W25Q64 是一个串行 Flash 芯片,读写操作通常包括:
例如:
uint8_t cmd[4] = {0x03, 0x00, 0x00, 0x00}; // 读指令 + 地址
如果 HAL_SPI_TransmitReceive() 的 TxData 和 RxData 长度不对,或者顺序错误,也会导致结果不一致。
✅ 解决方案(重点步骤)
1. 确保 HAL_SPI_Init() 正确配置 SPI 参数
SPI_HandleTypeDef hspi1;
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER; // 主模式
hspi1.Init.Direction = SPI_DIRECTION_2LINES; // 全双工
hspi1.Init.DataSize = SPI_DATASIZE_8BIT; // 8位数据
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW; // CPOL=0
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE; // CPHA=1
hspi1.Init.NSS = SPI_NSS_SOFT; // 软件控制 NSS
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16; // 16分频
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB; // MSB First
hspi1.Init.TIMode = SPI_TIMODE_DISABLE; // 不使用 TI 模式
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; // 不使用 CRC
hspi1.Init.CRCPolynomial = 7;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
}
重点: 必须确保 hspi1.Init.CLKPolarity 和 CLKPhase 与 W25Q64 的要求一致。
2. 使用 HAL_SPI_TransmitReceive() 发送命令和地址
示例代码(替代野火原始寄存器代码):
// 定义要发送的数据(命令+地址)
uint8_t txData[4] = {0x03, 0x00, 0x00, 0x00}; // 读操作
uint8_t rxData[4]; // 接收数据
// 调用 HAL 函数
HAL_StatusTypeDef status = HAL_SPI_TransmitReceive(&hspi1, txData, rxData, 4, 100);
if (status == HAL_OK)
{
// 成功接收到数据
for (int i = 0; i < 4; i++)
{
printf("rxData[%d] = 0x%02X\n", i, rxData[i]);
}
}
else
{
printf("SPI TransmitReceive Failed!\n");
}
重点: 一定要检查返回值 HAL_SPI_TransmitReceive(),并确保超时时间足够。
3. 检查 NSS 引脚控制
HAL 库默认使用软件控制 NSS(SPI_NSS_SOFT),你需要手动拉低 NSS 引脚后再发送数据,发送完后拉高。
// 拉低 NSS
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET); // 假设 NSS 连接到 PA4
// 发送数据
HAL_SPI_TransmitReceive(&hspi1, txData, rxData, 4, 100);
// 拉高 NSS
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
重点: 如果 NSS 未正确控制,SPI 通信将失败。
4. 对比野火原代码(寄存器方式)
野火代码中可能有如下结构(以读操作为例):
// 使能 SPI
SPI_Cmd(SPI1, ENABLE);
// 发送命令字节
while (SPI_I2S_GetFlagStatus(SPI1, SPI_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, 0x03);
// 发送地址字节
while (SPI_I2S_GetFlagStatus(SPI1, SPI_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, 0x00);
// ...
重点: 野火代码是逐字节发送,而 HAL_SPI_TransmitReceive() 是一次性发送整个缓冲区。
✅ 总结对比
| 项目 | HAL_SPI_TransmitReceive() | 寄存器方式 |
|------|--------------------------|-------------|
| 是否自动处理状态 | 是(阻塞) | 需手动轮询标志位 |
| 数据发送方式 | 批量发送 | 逐字节发送 |
| NSS 控制 | 需手动控制 | 通常由硬件自动处理 |
| 代码简洁性 | 更简洁 | 更冗长 |
| 易错点 | 配置参数、超时、NSS 控制 | 状态判断复杂 |
✅ 推荐做法
如果你希望简化代码,并且 SPI 配置正确,建议使用 HAL_SPI_TransmitReceive(),但必须注意以下几点:
- 确保 SPI 初始化参数正确
- 手动控制 NSS 引脚
- 检查返回值并处理超时
- 发送数据长度与接收长度一致
✅ 修改后的完整示例代码(适用于 W25Q64 读取)
#include "main.h"
#include "stdio.h"
SPI_HandleTypeDef hspi1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_SPI1_Init();
uint8_t txData[4] = {0x03, 0x00, 0x00, 0x00}; // 读操作
uint8_t rxData[4];
// 拉低 NSS
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
// 发送命令和地址
HAL_SPI_TransmitReceive(&hspi1, txData, rxData, 4, 100);
// 拉高 NSS
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
// 输出接收到的数据
for (int i = 0; i < 4; i++)
{
printf("rxData[%d] = 0x%02X\n", i, rxData[i]);
}
while (1);
}
// ...(其余初始化函数略)
如有更多代码细节(如具体引脚、SPI 配置等),欢迎继续提供,我可以帮你进一步调试。