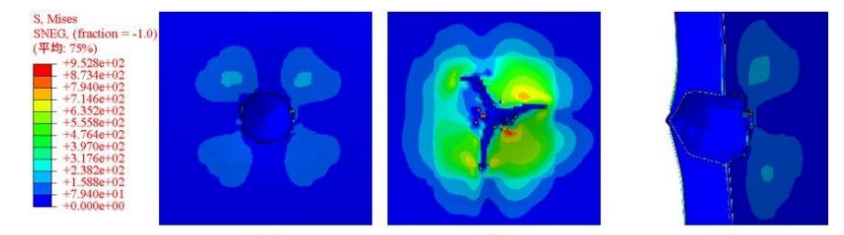
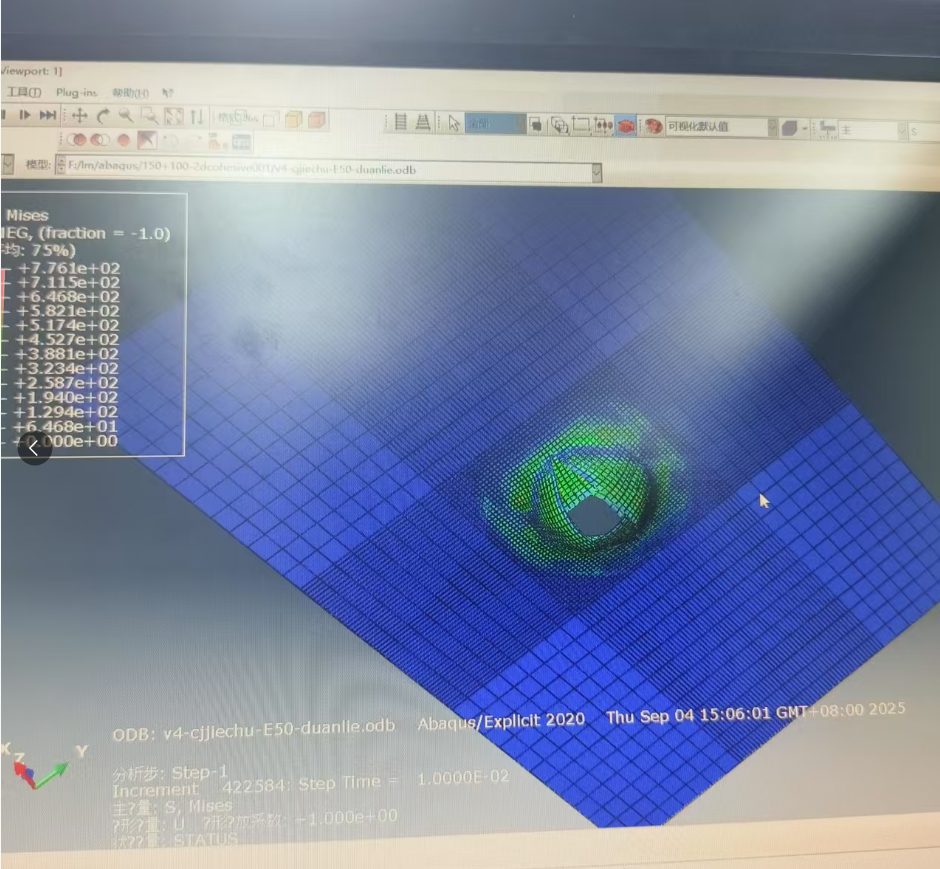
我用abaqus做复合材料夹芯板的冲击仿真,为啥我的碳板冲破破口这么奇怪,没法像论文中这张图片一样这么丝滑

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
你提到在使用 Abaqus 进行 复合材料夹芯板冲击仿真 时,发现碳纤维板的冲破破口形状“奇怪”,无法像论文中那样“丝滑”。这是一个非常常见的问题,尤其是在复合材料冲击仿真中,影响结果的关键因素非常多。下面我将从原因分析和解决方案两个方面进行详细说明,并提供优化建议。
重点:复合材料的性能高度依赖于铺层顺序、角度以及材料参数的准确性。
重点:网格是仿真精度的基础,尤其是对于脆性破坏的复合材料结构。
重点:接触定义直接影响冲击过程中能量的传递与破坏模式。
重点:冲击仿真的关键在于如何准确模拟实际冲击过程。
重点:动态冲击仿真对时间步长非常敏感,需合理设置。
# 定义复合材料层合板的材料属性
material = mdb.models['Model-1'].Material(name='Carbon_Fiber')
material.Elastic(table=((E1, E2, E3, G12, G13, G23), )) # 弹性模量
material.Poisson(table=((nu12, nu13, nu23), )) # 泊松比
material.DamageInitiation(table=((0.005, 0.005, 0.005, 0.005), )) # 失效应变
material.DamageEvolution(table=((0.9, 0.9, 0.9, 0.9), )) # 损伤演化
# 在冲击点附近创建局部网格
part = mdb.models['Model-1'].parts['Part-1']
seedEdgeBySize(
edges=part.edges.findAt((0.0, 0.0, 0.0), ),
size=0.5,
constraint=FINISH)
mesh = part.ElementType(elemTypes=(meshElemType1,))
part.seedEdgeBySize(
edges=part.edges.findAt((0.0, 0.0, 0.0), ),
size=0.5,
constraint=FINISH)
part.mesh()
# 创建接触对
interaction = mdb.models['Model-1'].ContactPair(
name='Impact_Pair',
master=mdb.models['Model-1'].parts['Tool'].surfaces['Tool_Surface'],
slave=mdb.models['Model-1'].parts['Plate'].surfaces['Plate_Surface'])
interaction.Tie(
adjust=ON,
master=mdb.models['Model-1'].parts['Tool'].surfaces['Tool_Surface'],
slave=mdb.models['Model-1'].parts['Plate'].surfaces['Plate_Surface'])
# 施加位移载荷
load = mdb.models['Model-1'].DisplacementBC(
name='Impact_BC',
createStepName='Initial',
region=regionObject,
u1=5.0,
u2=0.0,
u3=0.0,
ur1=0.0,
ur2=0.0,
ur3=0.0)
# 设置显式求解器
job = mdb.models['Model-1'].Job(
name='Impact_Job',
model='Model-1',
description='',
type=ANALYSIS,
atTime=None,
waitMinutes=0,
waitHours=0,
parallelizationMethod=DEFAULT,
numCpus=1,
numGPUs=0)
job.writeInput()
job.submit()
| 问题 | 解决方案 | |------|----------| | 材料模型错误 | 使用 Hashin/Puck 损伤模型,验证弹性参数 | | 网格划分不合理 | 局部加密,使用六面体网格 | | 接触定义错误 | 正确设置目标面和主面,调整摩擦系数 | | 载荷施加方式不当 | 使用位移控制加载,设定合理速度 | | 时间步长控制不佳 | 使用显式求解器,设置合适的时间步长 |
如果你愿意提供具体的模型文件、材料参数或截图,我可以进一步帮助你定位问题并优化模型。希望这些建议能帮你提升仿真结果的准确性与美观度!
分享 创建了问题
9月7日
创建了问题
9月7日

