上午好☀️☀️☀️️
本答案参考通义千问
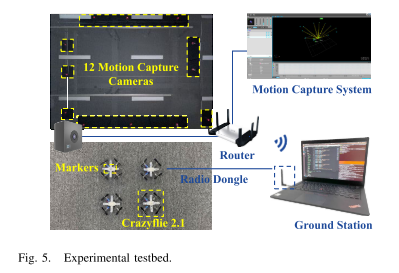
根据你提供的信息,Crazyflie 2.1 小无人机与青瞳视觉动捕系统的适配问题,主要涉及到 Crazyswarm 框架与 青瞳视觉动捕系统(如 Vicon 或 OptiTrack) 的数据通信和控制逻辑的适配。你提到已经可以通过 mocap_hlp.cpp 接收到位姿数据,但在启动 crazyswarm_s.cpp 节点时却提示“没接收到数据”,这说明数据传递或通信链路存在问题。
✅ 问题分析
-
数据接收端未正确连接
crazyswarm_s.cpp 可能没有正确监听来自 mocap_hlp.cpp 的数据。- 需要确认
mocap_hlp.cpp 是否将数据发布到 ROS topic 上,并且 crazyswarm_s.cpp 是否订阅了该 topic。
-
通信协议不匹配
mocap_hlp.cpp 可能使用的是特定的动捕系统协议(如 Vicon、OptiTrack),而 crazyswarm_s.cpp 默认可能使用的是其他格式(如 geometry_msgs/PoseStamped)。- 需要将动捕系统的数据格式转换为
crazyswarm 所需的格式。
-
ROS 节点未正确启动或配置
- 确保所有节点(包括
mocap_hlp 和 crazyswarm_s)都已正确启动,并且在同一个 ROS master 下运行。
-
缺少必要的依赖或驱动
- 如果使用的是非标准动捕系统(如青瞳视觉),需要确保其 SDK 已安装并正确集成到 ROS 中。
🔧 解决方案步骤
1. 确认 mocap_hlp.cpp 正确发布数据
- 在
mocap_hlp.cpp 中,检查是否将数据发布到了 ROS topic(例如 /mocap_data)。 - 使用以下命令查看是否有数据发布:
rostopic echo /mocap_data
如果没有任何输出,说明 mocap_hlp.cpp 没有正确发布数据,或者动捕系统未连接成功。
2. 修改 mocap_hlp.cpp 数据格式以适配 crazyswarm
crazyswarm 通常期望的是 geometry_msgs/PoseStamped 格式。- 修改
mocap_hlp.cpp,将动捕系统获取的位姿数据转换为 PoseStamped 格式。
✅ 示例代码片段(修改部分):
// 假设从动捕系统中获取到的位姿是:
// pose.x, pose.y, pose.z, quat.w, quat.x, quat.y, quat.z
geometry_msgs::PoseStamped pose_msg;
pose_msg.header.stamp = ros::Time::now();
pose_msg.header.frame_id = "world";
pose_msg.pose.position.x = x; // 从动捕系统获取的 x
pose_msg.pose.position.y = y; // 从动捕系统获取的 y
pose_msg.pose.position.z = z; // 从动捕系统获取的 z
pose_msg.pose.orientation.w = qw;
pose_msg.pose.orientation.x = qx;
pose_msg.pose.orientation.y = qy;
pose_msg.pose.orientation.z = qz;
pub.publish(pose_msg);
3. 确保 crazyswarm_s.cpp 订阅了正确的 topic
- 在
crazyswarm_s.cpp 中,检查是否订阅了 mocap_hlp.cpp 发布的 topic(如 /mocap_data)。 - 如果未订阅,需要添加如下代码:
ros::Subscriber sub = nh.subscribe("/mocap_data", 1000, &MocapCallback);
void MocapCallback(const geometry_msgs::PoseStamped::ConstPtr& msg) {
// 处理接收到的位姿数据
}
4. 检查 ROS 环境和节点启动顺序
- 确保
mocap_hlp 和 crazyswarm_s 在同一 ROS master 下运行。 - 启动顺序建议如下:
# 启动动捕系统(如青瞳视觉)
roscore
# 启动 mocap_hlp 节点
rosrun your_package mocap_hlp
# 启动 crazyswarm_s 节点
rosrun crazyswarm crazyswarm_s
5. 验证数据流是否正常
rostopic list
- 查看
mocap_hlp 和 crazyswarm_s 是否在同一个网络下。
📌 总结:关键修改点
| 问题 | 解决方法 |
|------|----------|
| 动捕数据未发布 | 检查 mocap_hlp.cpp 是否正确发布数据 |
| 数据格式不匹配 | 将动捕数据转换为 geometry_msgs/PoseStamped |
| 节点未订阅 | 在 crazyswarm_s.cpp 中添加对 /mocap_data 的订阅 |
| ROS 环境异常 | 确保所有节点在同一个 ROS master 下运行 |
📘 参考链接
如果你可以提供 mocap_hlp.cpp 的具体代码或错误日志,我可以进一步帮助你定位问题!