ethercat 雅特力407主站控制松下伺服驱动器 报错
有偿: 实现控制伺服驱动电机动

ethercat 雅特力407主站控制松下伺服驱动器 报错
有偿: 实现控制伺服驱动电机动
 分享
分享
 关注
关注让【宝码香车】来帮您解答,本回答参考DeepSeek编写,并整理提供。
如果答案让您满意,请采纳、点赞、关注,非常感谢!
.
每日一句正能量,让它带给您好心情:别让任何人消耗你内心的晴朗,生活应该是被热爱的。
.
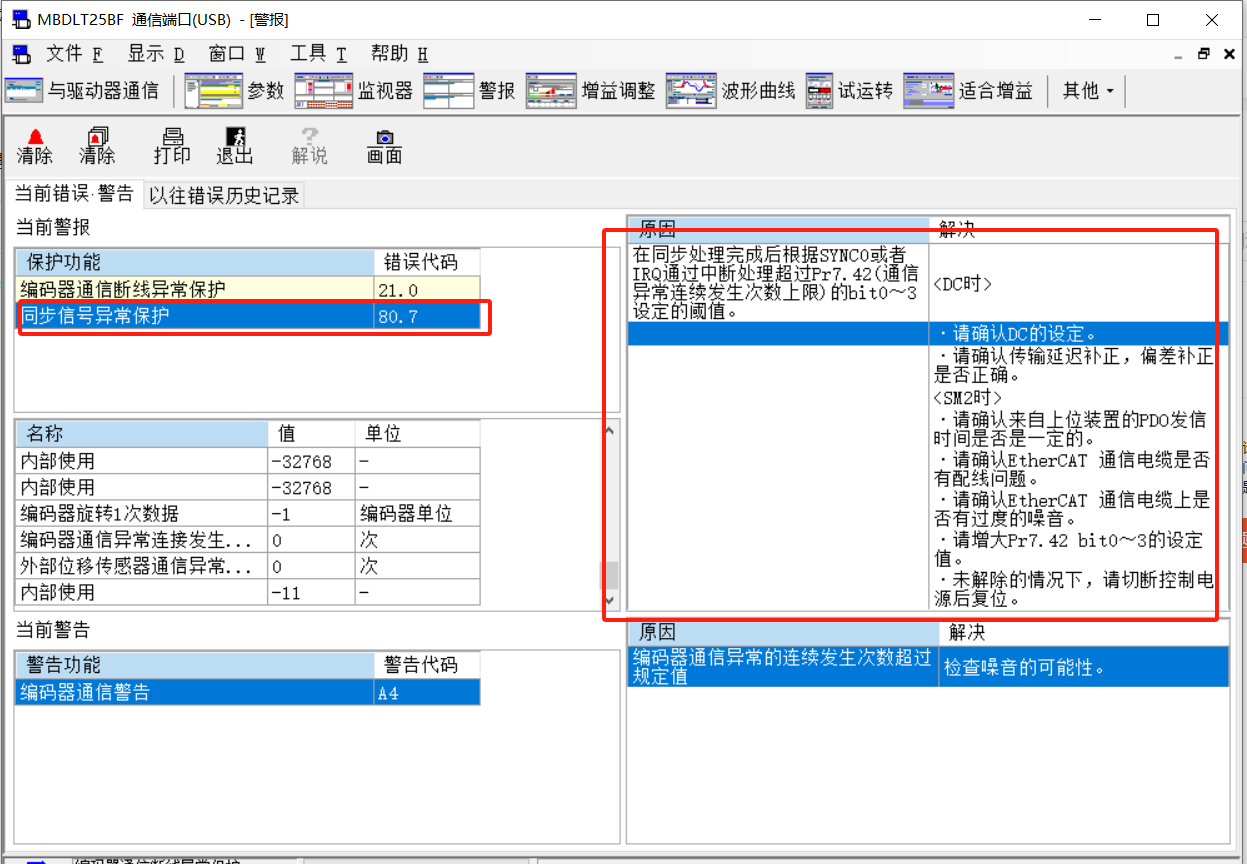
根据您提供的 EtherCAT 主站(雅特力 AT32F407)控制松下伺服驱动器的报错信息,问题核心在于 SDO 写入失败 和 同步信号异常。
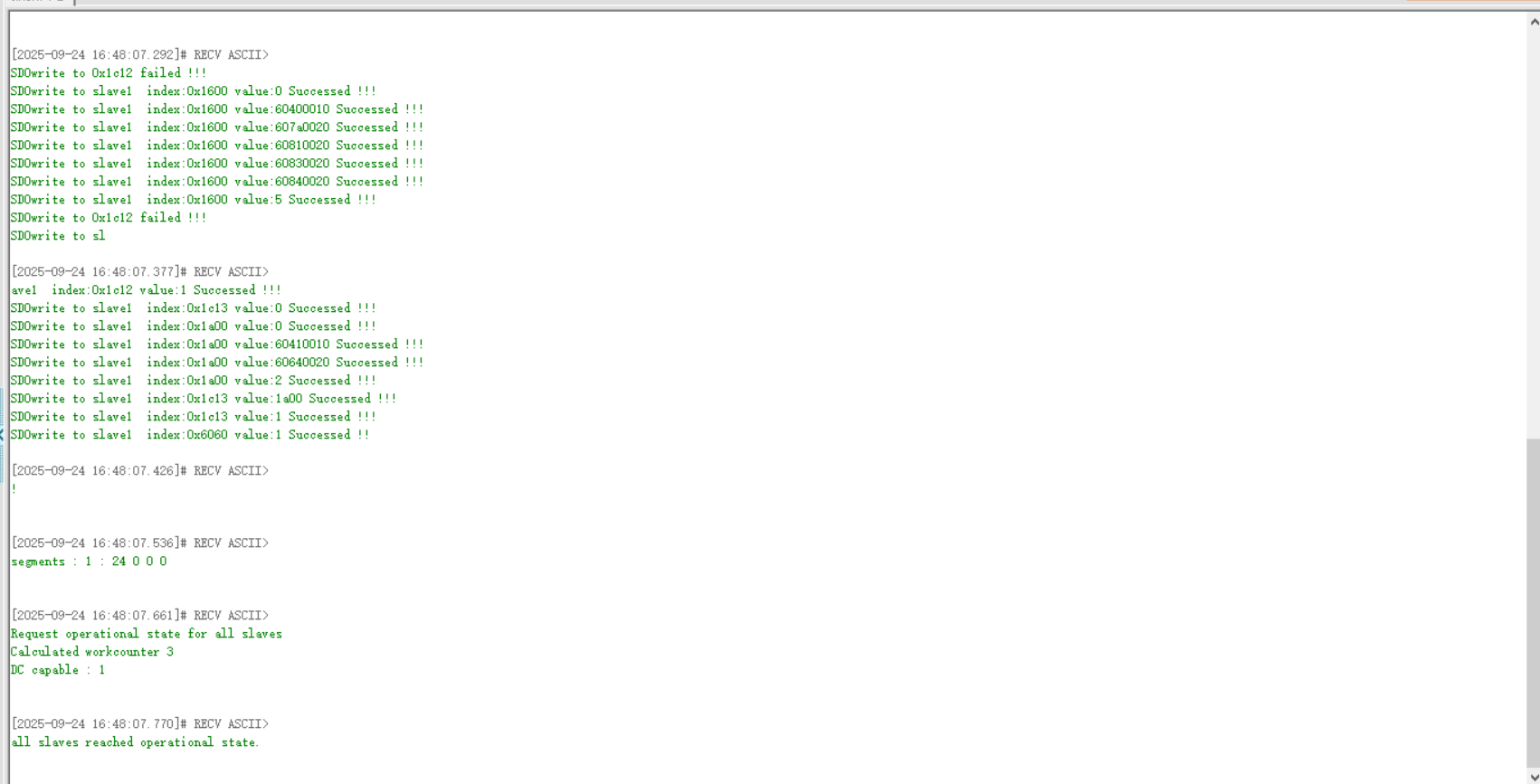
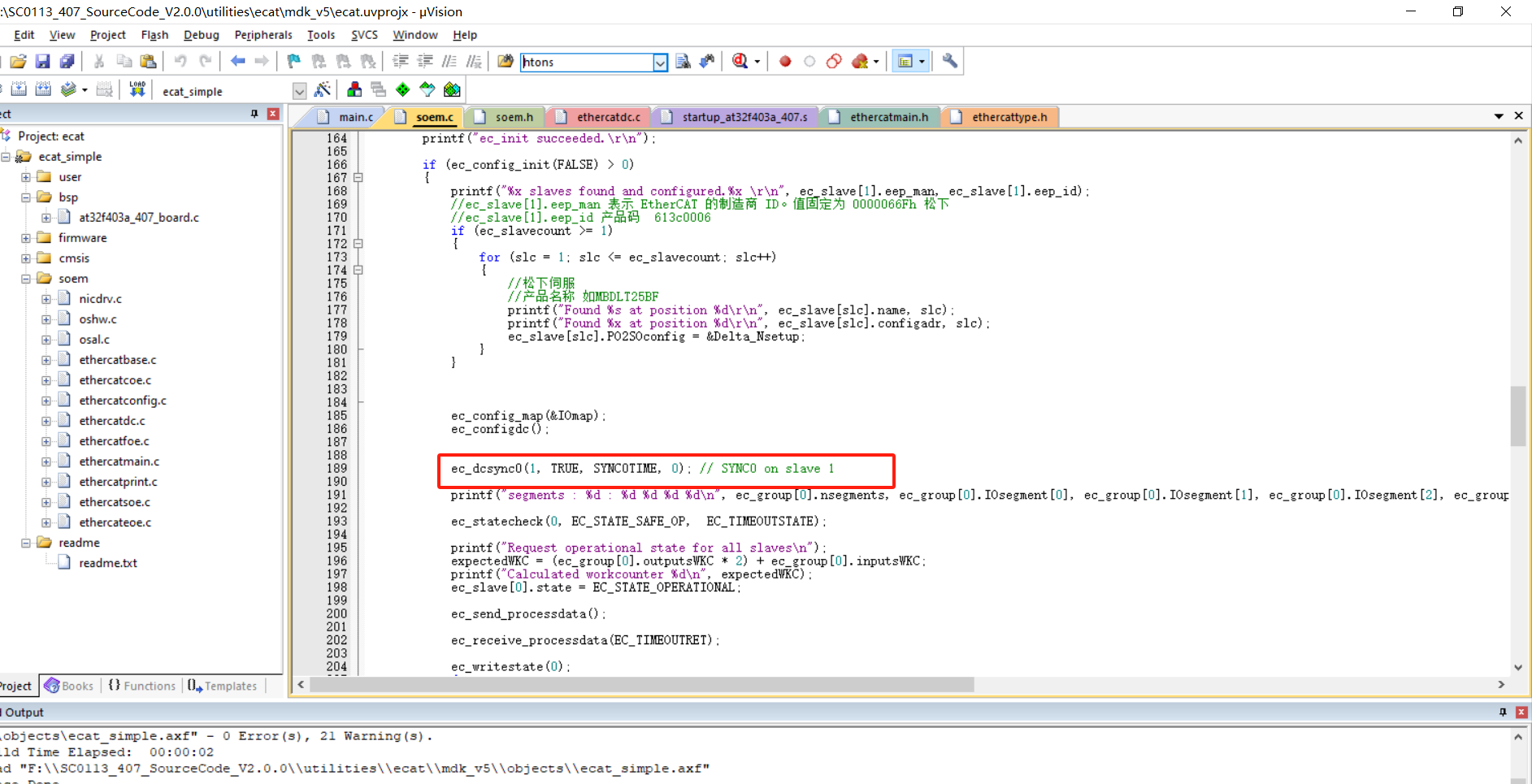
SDOwrite te 0x1c12 failed !!!**:这是最直接的错误。对象字典索引 0x1c12 是 同步管理器 2 的同步类型(Sync Manager 2 Sync Type)。写入失败表明主站尝试配置从站(伺服驱动器)的同步通信参数时被拒绝。ec_dcsync0(1, TRUE, SYNC0CYCLE, 0),这表示主站希望将 从站 1(伺服驱动器)设置为 DC 同步从站。0x1600, 0x1a00 等)可能不正确,或者驱动器不支持您尝试映射的对象,导致 0x1c12 配置失败,从而使整个 DC 同步链路无法建立。解决方案的核心是检查和修正 PDO 映射配置,确保主站发送的映射参数与松下伺服驱动器的 EtherCAT 协议规范完全一致。
您需要找到松下伺服驱动器对应的 ESI (EtherCAT Slave Information) 文件 或 XML 描述文件。这个文件精确定义了驱动器支持的 PDO 对象。
根据正确的 PDO 映射信息,修改您的主站配置代码。错误日志显示您正在配置索引 0x1600 和 0x1a00,需要确保其中的子索引和对象地址是正确的。
在您的 main.c 或配置文件中,找到配置 PDO 映射的部分(通常是通过一系列 SDO 写入操作),并将其修改为与驱动器文档一致。
示例修正思路(请根据实际文档修改):
// 假设以下是配置从站1的 RxPDO 映射 (0x1600)
// 错误的映射可能导致 0x1c12 配置失败
// 正确的配置示例(请替换为您的驱动器实际支持的参数)
// 映射 2 个对象到 RxPDO: 控制字(0x6040) 和 目标位置(0x607A)
SDOwrite(1, 0x1600, 0, 0x60400010); // 子索引0, 对象 0x6040,长度16位
SDOwrite(1, 0x1600, 1, 0x607A0020); // 子索引1, 对象 0x607A,长度32位
SDOwrite(1, 0x1600, 0, 2); // 最后写入映射的对象数量(此处为2个)
// 配置对应的 TxPDO 映射 (0x1A00)
// 映射 2 个对象到 TxPDO: 状态字(0x6041) 和 实际位置(0x6064)
SDOwrite(1, 0x1A00, 0, 0x60410010); // 状态字,16位
SDOwrite(1, 0x1A00, 1, 0x60640020); // 实际位置,32位
SDOwrite(1, 0x1A00, 0, 2); // 对象数量
// 在正确的 PDO 映射配置成功后,再配置同步管理器(SM) 和 分布式时钟(DC)
// ...
ec_dcsync0(1, TRUE, SYNC0CYCLE, 0);
登录松下伺服驱动器的参数设置软件(如 Panasonic FDA),检查以下关键参数是否与 EtherCAT 通信相关并设置正确:
当前问题的焦点是 SDO 写入 0x1c12 失败,其根源是 PDO 映射配置不正确。请务必依据松下伺服驱动器的官方 EtherCAT 文档来修正主站中的 PDO 映射参数。一旦映射正确,同步信号异常报警(A7)通常会自动解除。
分享 创建了问题
9月24日
创建了问题
9月24日


