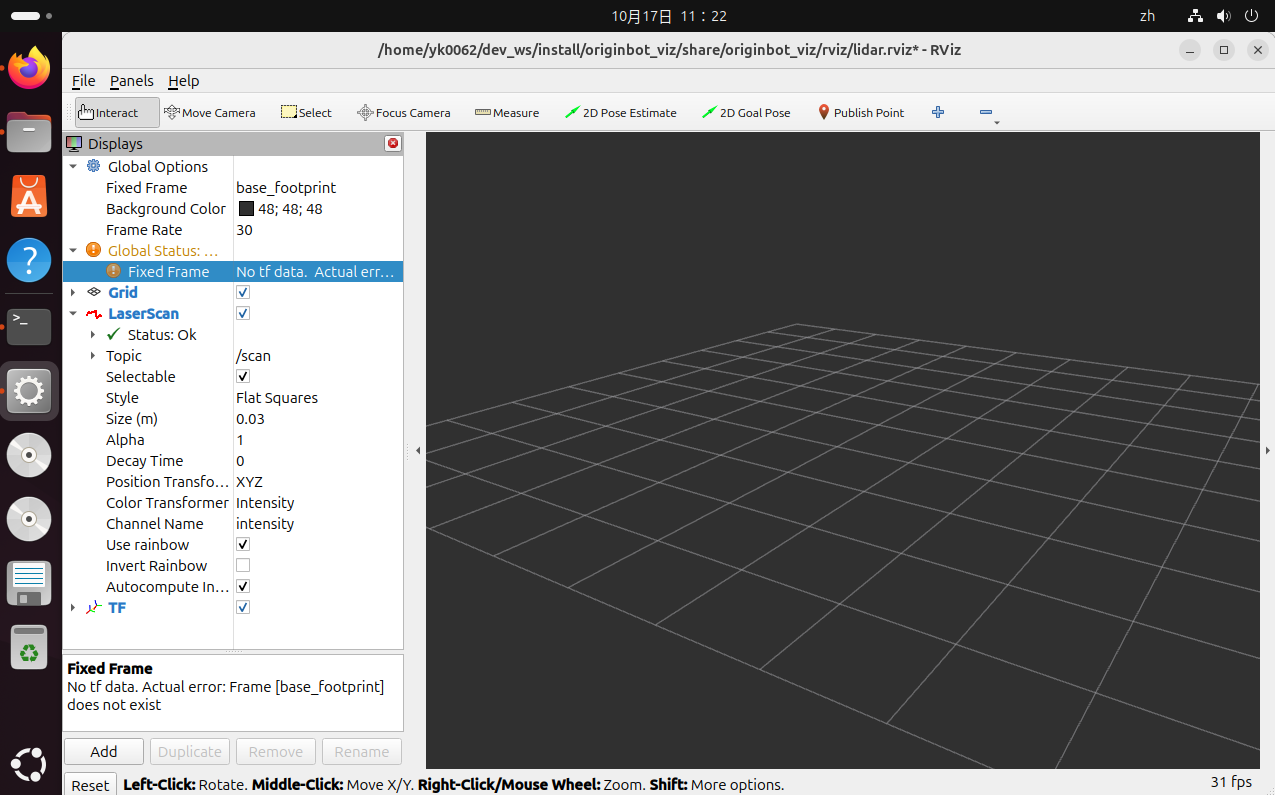
按照古月居的教程来运行originbot上的雷达,开启上位机后没有显示任何实时路径和画面,系统为Ubuntu24.04.3(vmare虚拟机),看报错是由文件包不存在,但是不知道解决方法,望帮助

按照古月居的教程来运行originbot上的雷达,开启上位机后没有显示任何实时路径和画面,系统为Ubuntu24.04.3(vmare虚拟机),看报错是由文件包不存在,但是不知道解决方法,望帮助
 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
package_name文件包。bash
sudo apt-get update
sudo apt-get install package_namebash
pip install package_namebash
source /opt/ros/your_ros_version/setup.bashbash
rosdep install -y your_package_name希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 系统已结题
10月25日
系统已结题
10月25日 已采纳回答
10月17日
创建了问题
10月17日
已采纳回答
10月17日
创建了问题
10月17日


