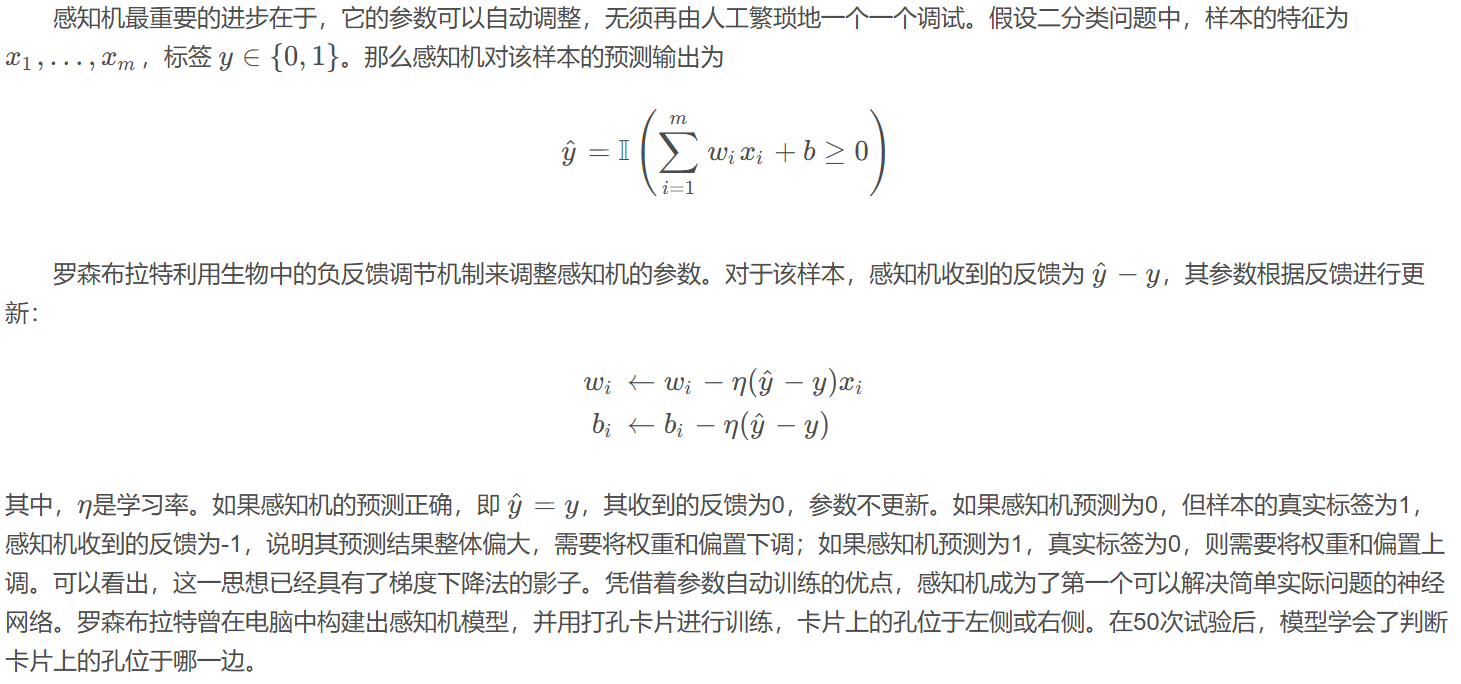
介绍问罗森布拉特感知机的部分,wi'=wi-η(yhat-y)xi,b'=b+η(yhat-y),反馈yhat-y。
如果预测值yhat=0,真实值y=1,则反馈=yhat-y=-1,说明预测值偏小,书上说预测值偏大要下调参数和权重。但是此时wi'=wi+ηxi,b'=b+η,此时wi和b更新变大,z=∑wixi+b更大了,这个逻辑怎么解释呢?

介绍问罗森布拉特感知机的部分,wi'=wi-η(yhat-y)xi,b'=b+η(yhat-y),反馈yhat-y。
如果预测值yhat=0,真实值y=1,则反馈=yhat-y=-1,说明预测值偏小,书上说预测值偏大要下调参数和权重。但是此时wi'=wi+ηxi,b'=b+η,此时wi和b更新变大,z=∑wixi+b更大了,这个逻辑怎么解释呢?
 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 修改了问题
10月19日
创建了问题
10月19日
修改了问题
10月19日
创建了问题
10月19日

