我用的描述档是kinova 提供的ros包里的j2n6s300.xacro
问题如下图

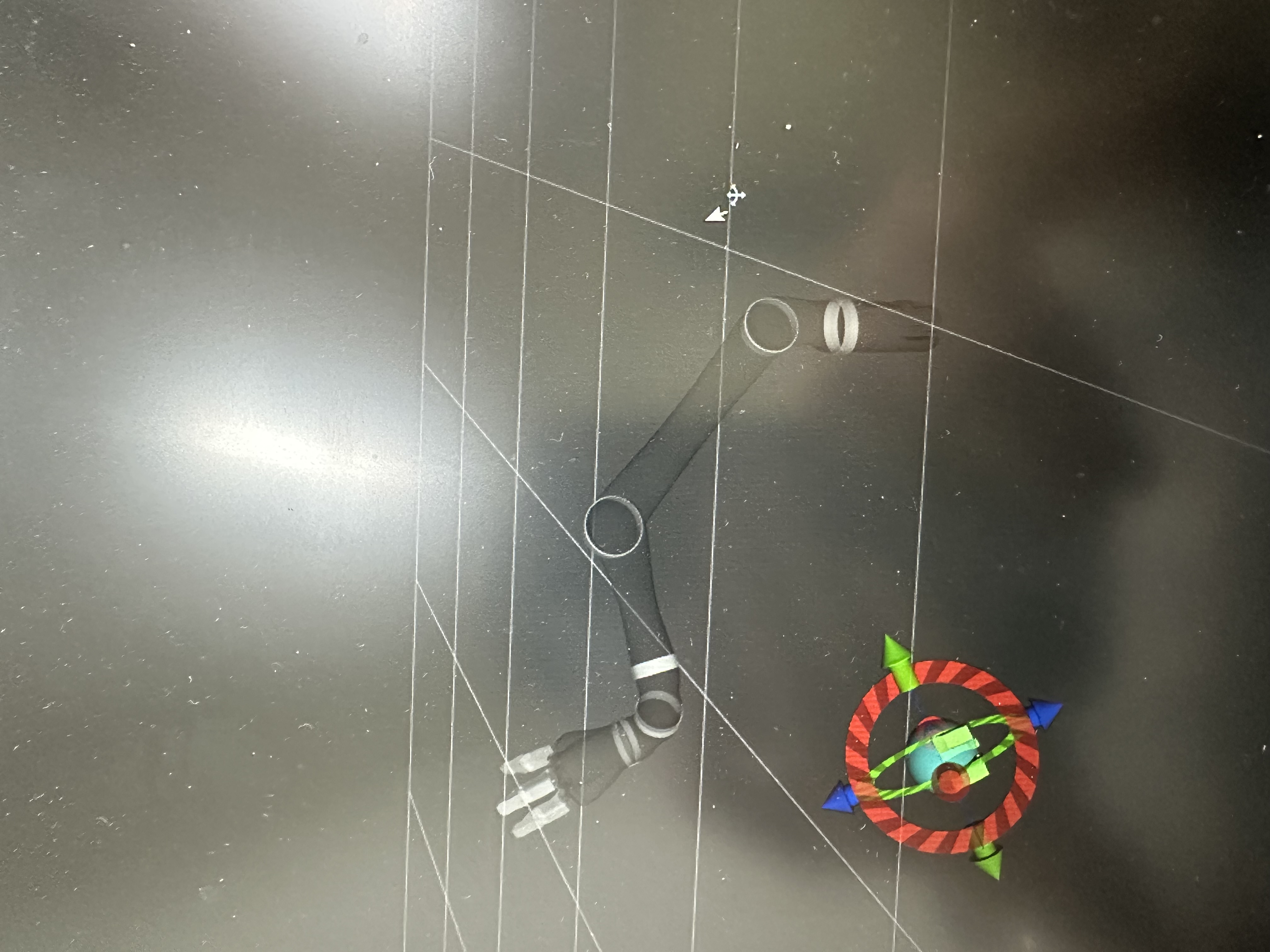

我用的描述档是kinova 提供的ros包里的j2n6s300.xacro
问题如下图
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
问题分析
你使用Kinova j2n6s300的RViz,发现第四跟第五关节的显示与实际不符。这个问题可能与Xacro描述文件有关。
解决方案
核心代码
如果你需要修改Xacro描述文件,可以尝试以下代码:
<joint name="j4" type="revolute">
<origin xyz="0 0 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="100" velocity="100" lower="-3.14" upper="3.14"/>
</joint>
<joint name="j5" type="revolute">
<origin xyz="0 0 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="100" velocity="100" lower="-3.14" upper="3.14"/>
</joint>
请注意,这是示例代码,需要根据你的实际需求进行修改。
分享 创建了问题
10月23日
创建了问题
10月23日
