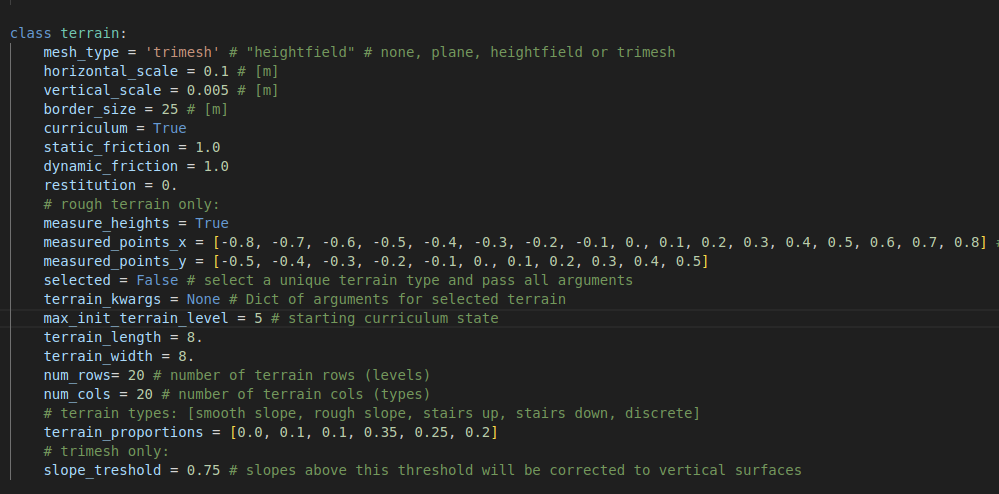
使用unitree_rl_gym开源代码进行四足机器人训练,将mesh_type参数修改为trimesh后,训练时地形仍为平地,可以解决吗

 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
问题分析
你使用 unitree_rl_gym 开源代码进行四足机器人训练,修改了 mesh_type 参数为 trimesh,但是训练时地形仍然是平地。
解决方案
可能的原因是 trimesh 参数修改后,地形文件没有被正确加载或生成。可以尝试以下解决方案:
trimesh 参数。unitree_rl_gym 提供的工具或脚本。mesh_type 参数被正确设置为 trimesh。核心代码
import gym
from unitree_rl_gym import UnitreeGym
# 创建环境
env = UnitreeGym('walker2')
# 修改地形类型
env.mesh_type = 'trimesh'
# 重新生成地形
env.reset()
# 开始训练
for i in range(1000):
env.step(env.action_space.sample())
env.render()
注意
上述代码仅为示例,具体实现可能需要根据 unitree_rl_gym 的文档和 API 进行调整。
分享 创建了问题
10月27日
创建了问题
10月27日


