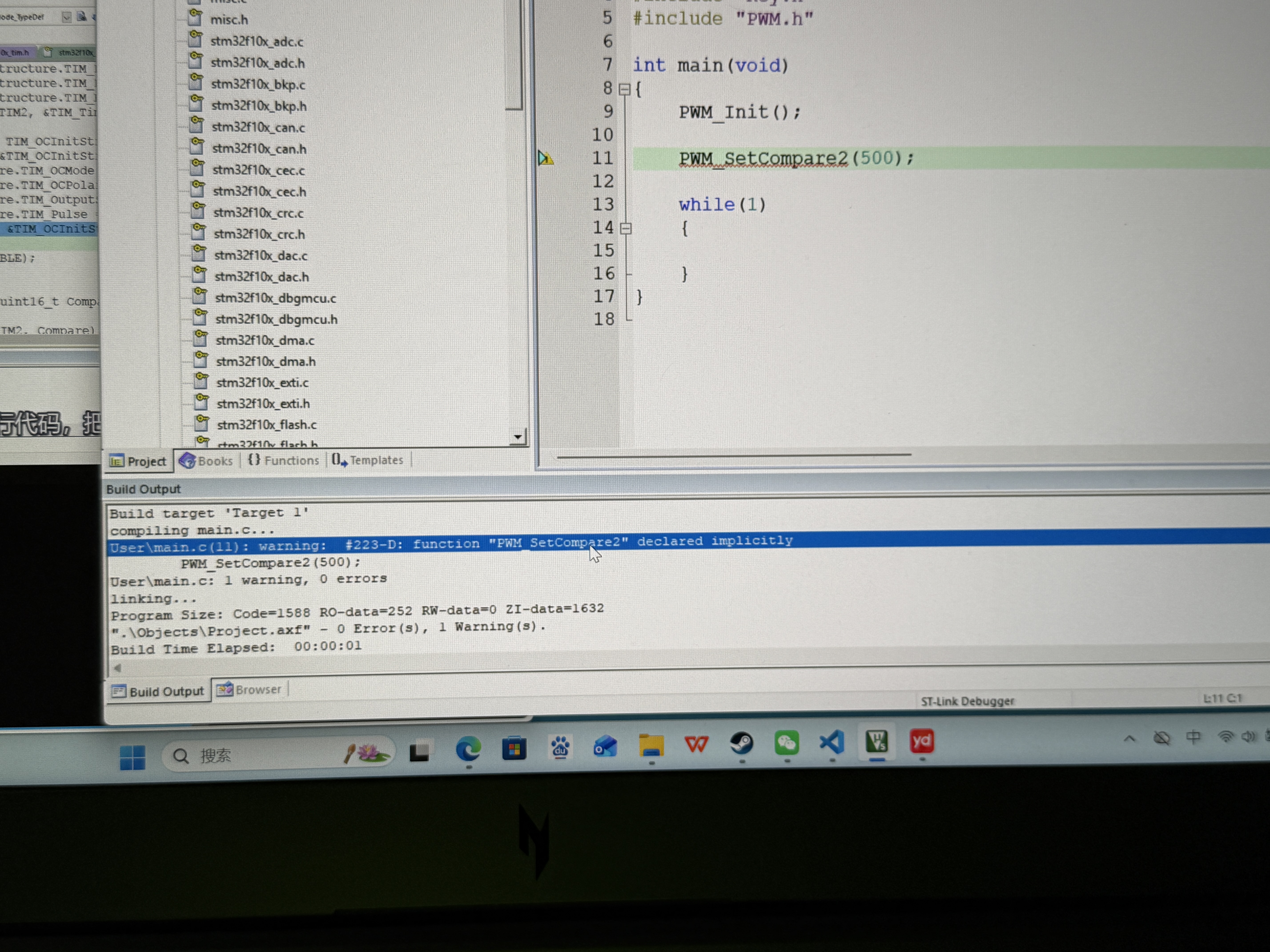
跟着江科教城编写的,写完出现这个警告,然后舵机也不动,请问要怎么修改

 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
#include "stm32f10x.h"
void TIM3_PWM_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 使能TIM3和GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置PA.7为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 定时器基本配置
TIM_TimeBaseStructure.TIM_Period = 999; // PWM周期,这里设定为1ms
TIM_TimeBaseStructure.TIM_Prescaler = 71; // 72MHz/72 = 1MHz,用于产生1kHz的PWM频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
// PWM模式配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; // 初始占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
// 使能TIM3
TIM_Cmd(TIM3, ENABLE);
}
// 设置舵机角度,angle范围0到180
void SetServoAngle(u16 angle)
{
u16 pulse = (angle * 1000 / 180) + 500; // 计算占空比,500us到2500us对应0到180度
TIM_SetCompare1(TIM3, pulse);
}
int main(void)
{
TIM3_PWM_Init();
while (1)
{
SetServoAngle(90); // 设置舵机到90度
for (volatile int i = 0; i < 1000000; i++); // 简单延时
SetServoAngle(0);
for (volatile int i = 0; i < 1000000; i++);
}
}
请注意,以上代码仅为示例,实际应用中可能需要根据具体的STM32型号和开发环境进行调整。
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 创建了问题
11月14日
创建了问题
11月14日


