在mujoco验证机器人学的加速度公式,

用以上这个函数获取site的加速度,和我用公式算出来的结果不一样,而且这个函数返回的角速度都是0,而且z轴的加速度也不包括重力加速度,
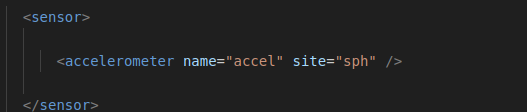
但我在xml里添加这个标签之后, 这个函数返回的就和我算的结果一样了, 返回的结果里也包含了 重力加速度, 而且这个site 写其他的site名字也可以 。 这是为什么亚

在mujoco验证机器人学的加速度公式,
用以上这个函数获取site的加速度,和我用公式算出来的结果不一样,而且这个函数返回的角速度都是0,而且z轴的加速度也不包括重力加速度,
但我在xml里添加这个标签之后, 这个函数返回的就和我算的结果一样了, 返回的结果里也包含了 重力加速度, 而且这个site 写其他的site名字也可以 。 这是为什么亚
 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
mj_forward函数进行正向动力学模拟,然后通过mj_getAcc函数获取特定site的加速度。例如:model = mj.MjModel.from_xml_path(‘your_xml_file.xml’)
data = mj.MjData(model)
mj.forward(model, data)
site_id = model.site_name2id(‘your_site_name’)
acc = mj.mj_getAcc(model, data, site_id)
``
- 关于角速度为0的问题,需要检查模型中相关刚体的设置以及运动情况。确保刚体有正确的转动自由度,并且在模拟过程中有实际的转动输入。例如,如果刚体是通过关节连接的,检查关节的类型和驱动是否正确设置。
- 对于z轴加速度不包含重力加速度的情况,在mujoco中,重力加速度是可以通过模型参数进行设置的。在xml文件中,重力加速度默认是9.81,可以通过 … … … … … …
请注意,上述代码中的'your_xml_file.xml'和'your_site_name'需要替换为实际的xml文件名和site名称。同时,具体的问题可能还需要根据实际的模型和模拟情况进行更深入的分析和调试。
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 创建了问题
11月16日
创建了问题
11月16日


