用汇川PLC搭建转向交通灯控制系统,先配置I/O端口连接灯体元件,编写时序逻辑程序控制红绿黄灯交替亮灭,实现路口转向通行指引功能。

 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
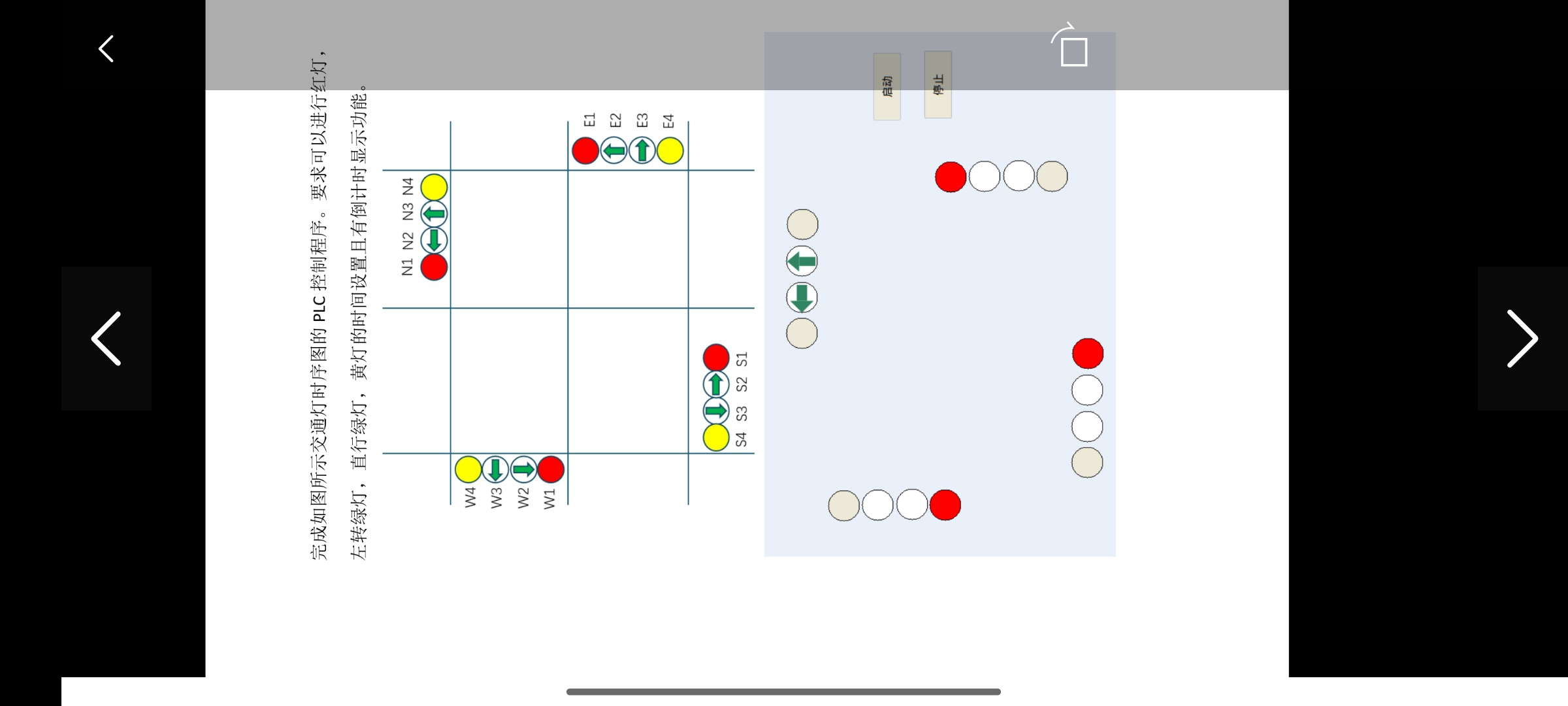
要使用汇川PLC完成一个转向交通灯控制系统,需要从以下几个方面进行设计和实现:硬件配置、I/O端口分配、时序逻辑程序编写。下面我将详细说明整个过程,并提供示例代码。
| 设备 | PLC点位 | 类型 | |------|---------|------| | 红灯(主路) | Q0.0 | 输出 | | 黄灯(主路) | Q0.1 | 输出 | | 绿灯(主路) | Q0.2 | 输出 | | 左转灯 | Q0.3 | 输出 | | 右转灯 | Q0.4 | 输出 | | 其他方向灯 | Q0.5, Q0.6, Q0.7 | 输出 |
注意:实际接线需根据具体PLC型号及模块配置进行调整。
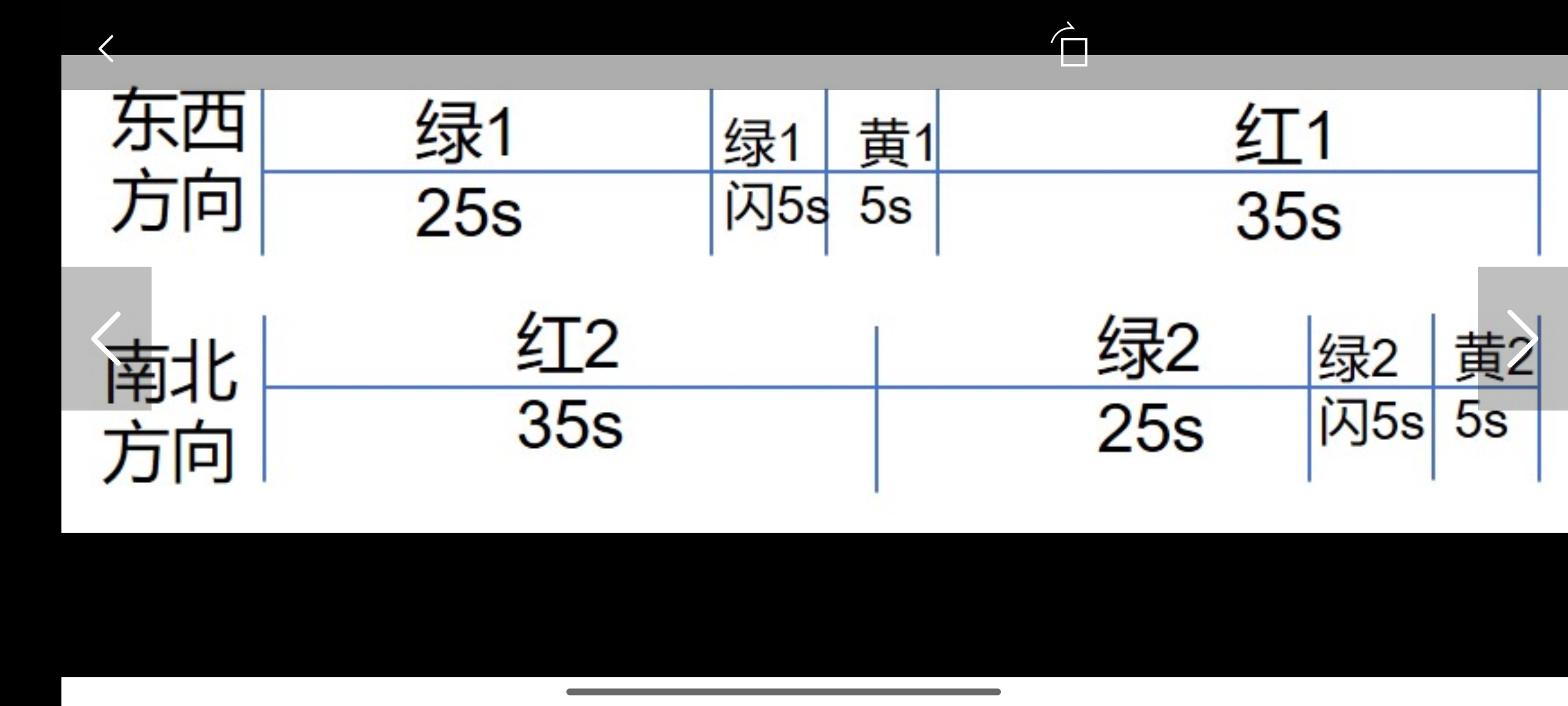
根据你提到的“时序图”,假设交通灯的工作流程如下:
以下是一个简单的时序逻辑程序示例(以H3U系列PLC为例,使用梯形图(LAD)或结构化文本(STL)):
| 变量名 | 类型 | 功能 | |--------|------|------| | Red_Light | BOOL | 主路红灯 | | Yellow_Light | BOOL | 主路黄灯 | | Green_Light | BOOL | 主路绿灯 | | Left_Turn | BOOL | 左转灯 | | Right_Turn | BOOL | 右转灯 | | Timer_1 | TON | 用于计时绿灯 | | Timer_2 | TON | 用于计时黄灯 | | Timer_3 | TON | 用于计时红灯 |
// 初始化定时器
MOV K1000 VD100 // 设置定时器时间(单位:ms)
TON Timer_1, VD100
// 主路绿灯亮
OUT Q0.2, Green_Light
// 当绿灯定时器完成时,启动黄灯
= Timer_1.Q, OUT Q0.1, Yellow_Light
// 当黄灯定时器完成时,启动红灯
= Timer_2.Q, OUT Q0.0, Red_Light
// 当主路为红灯时,启动左转灯
= Red_Light, OUT Q0.3, Left_Turn
// 当主路为红灯时,启动右转灯
= Red_Light, OUT Q0.4, Right_Turn
PROGRAM Main
VAR
Red_Light : BOOL := FALSE;
Yellow_Light : BOOL := FALSE;
Green_Light : BOOL := FALSE;
Left_Turn : BOOL := FALSE;
Right_Turn : BOOL := FALSE;
Timer_1 : TON;
Timer_2 : TON;
Timer_3 : TON;
END_VAR
// 初始化定时器
Timer_1(IN := TRUE, PT := T#10S);
Timer_2(IN := TRUE, PT := T#3S);
Timer_3(IN := TRUE, PT := T#5S);
// 主路绿灯亮
IF NOT Timer_1.Q THEN
Green_Light := TRUE;
Red_Light := FALSE;
Yellow_Light := FALSE;
Left_Turn := FALSE;
Right_Turn := FALSE;
ELSE
Green_Light := FALSE;
Yellow_Light := TRUE;
Timer_2(IN := TRUE, PT := T#3S);
END_IF;
// 主路黄灯亮
IF Timer_2.Q THEN
Yellow_Light := FALSE;
Red_Light := TRUE;
Timer_3(IN := TRUE, PT := T#5S);
END_IF;
// 主路红灯亮,启动转向灯
IF Timer_3.Q THEN
Red_Light := FALSE;
Left_Turn := TRUE;
Right_Turn := TRUE;
END_IF;
// 输出到PLC
Q0.0 := Red_Light;
Q0.1 := Yellow_Light;
Q0.2 := Green_Light;
Q0.3 := Left_Turn;
Q0.4 := Right_Turn;
END_PROGRAM
| 步骤 | 内容 | |------|------| | 1 | 配置I/O端口 | | 2 | 定义变量 | | 3 | 编写时序逻辑 | | 4 | 测试与调试 | | 5 | 实现转向灯控制 |
通过以上步骤,你可以使用汇川PLC搭建一个完整的转向交通灯控制系统。
如有更具体的时序图或需求,请提供,我可以进一步优化程序逻辑。
分享 创建了问题
11月21日
创建了问题
11月21日


