
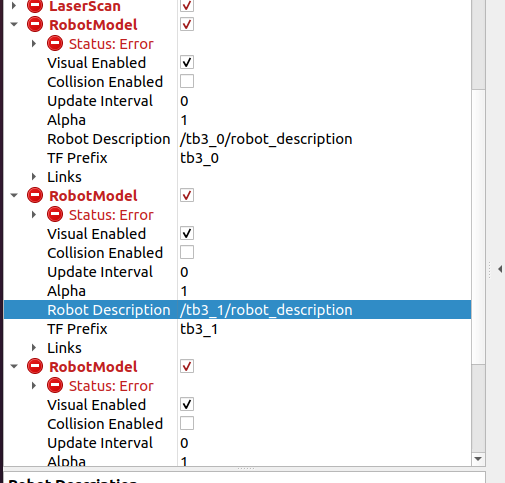
麻烦帮忙看一下bug在哪里,我的launch文件是以下代码,运行一直显示不出来机器人
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="50.0" />
<param name="tf_prefix" value="$(arg first_tb3)" />
</node>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model $(arg first_tb3) -x $(arg first_tb3_x_pos) -y $(arg first_tb3_y_pos) -z $(arg first_tb3_z_pos) -Y $(arg first_tb3_yaw) -param robot_description" />
<include file="$(find multi_turtlebot3_explore)/launch/gmapping.launch">
<arg name="robot_namespace" value="$(arg first_tb3)" />
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="50.0" />
<param name="tf_prefix" value="$(arg second_tb3)" />
</node>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model $(arg second_tb3) -x $(arg second_tb3_x_pos) -y $(arg second_tb3_y_pos) -z $(arg second_tb3_z_pos) -Y $(arg second_tb3_yaw) -param robot_description" />
<include file="$(find multi_turtlebot3_explore)/launch/gmapping.launch">
<arg name="robot_namespace" value="$(arg second_tb3)" />
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="50.0" />
<param name="tf_prefix" value="$(arg third_tb3)" />
</node>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model $(arg third_tb3) -x $(arg third_tb3_x_pos) -y $(arg third_tb3_y_pos) -z $(arg third_tb3_z_pos) -Y $(arg third_tb3_yaw) -param robot_description" />
<include file="$(find multi_turtlebot3_explore)/launch/gmapping.launch">
<arg name="robot_namespace" value="$(arg third_tb3)" />
</include>
能否有人看看如何解决?





