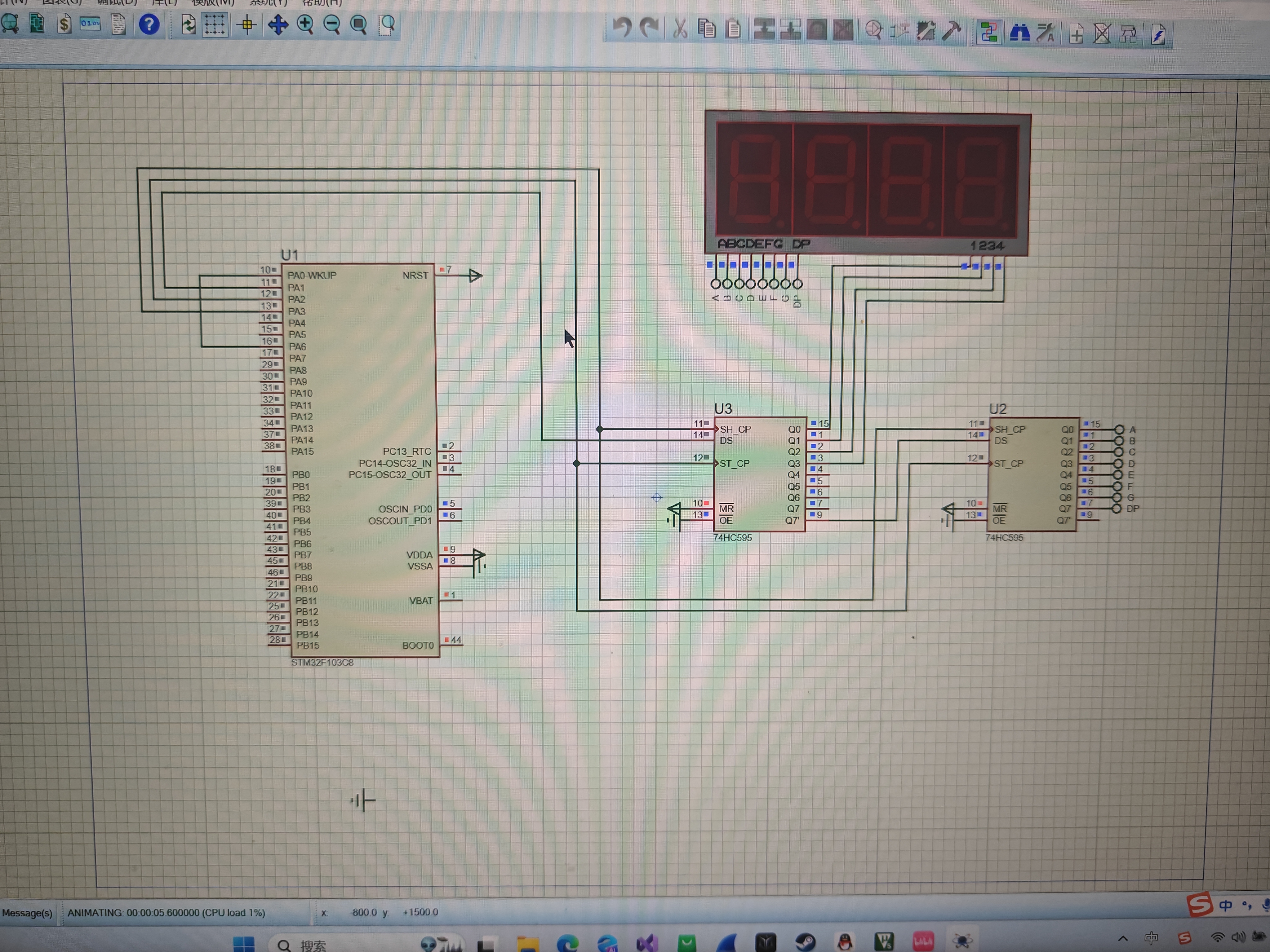
为什么stm32与hc595链接引脚无电平呢
pa0设置为波形输出,pa6设置为波形输入,完成频率和占空比的测量并显示在数码管上,感谢感谢
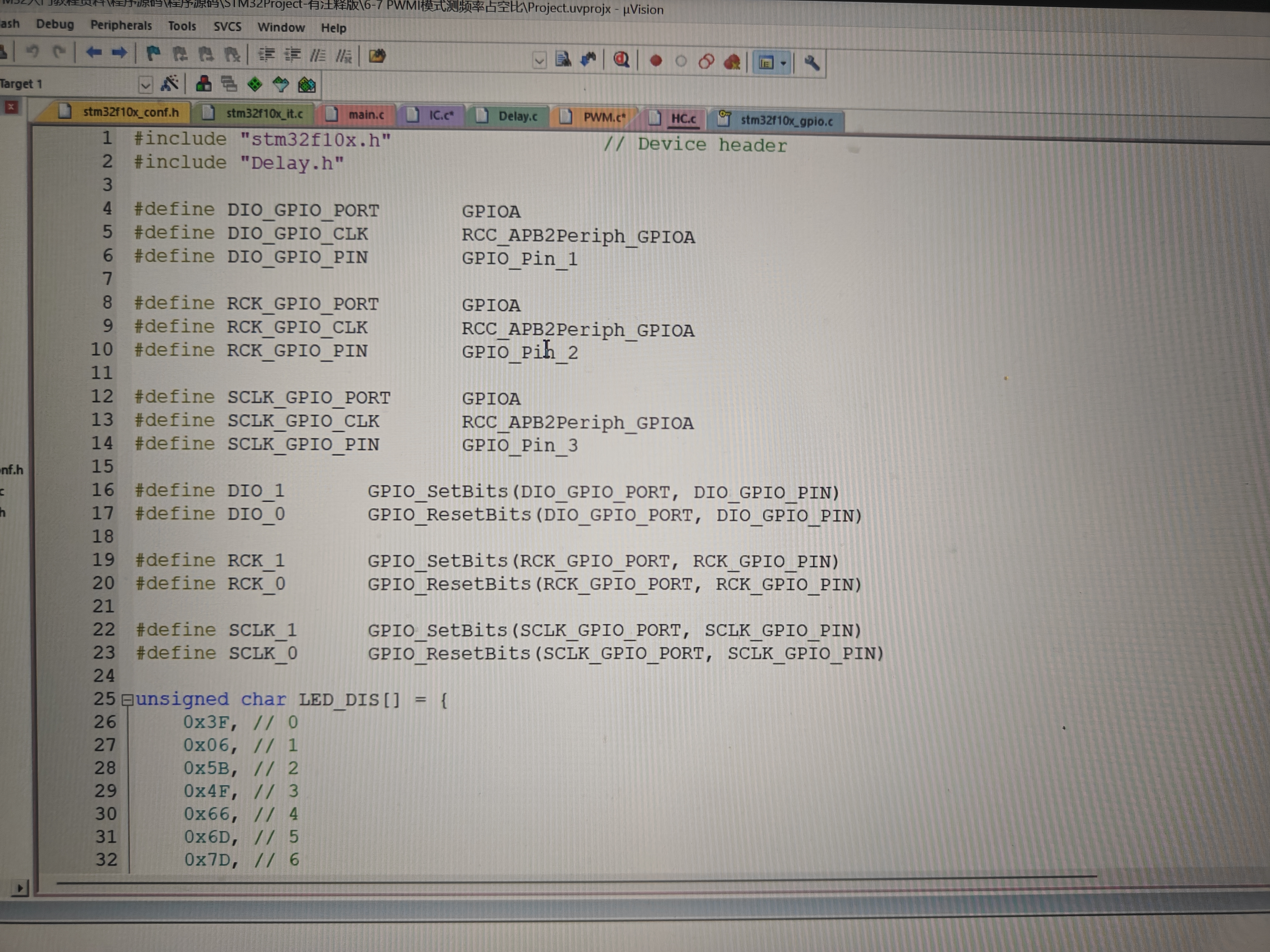
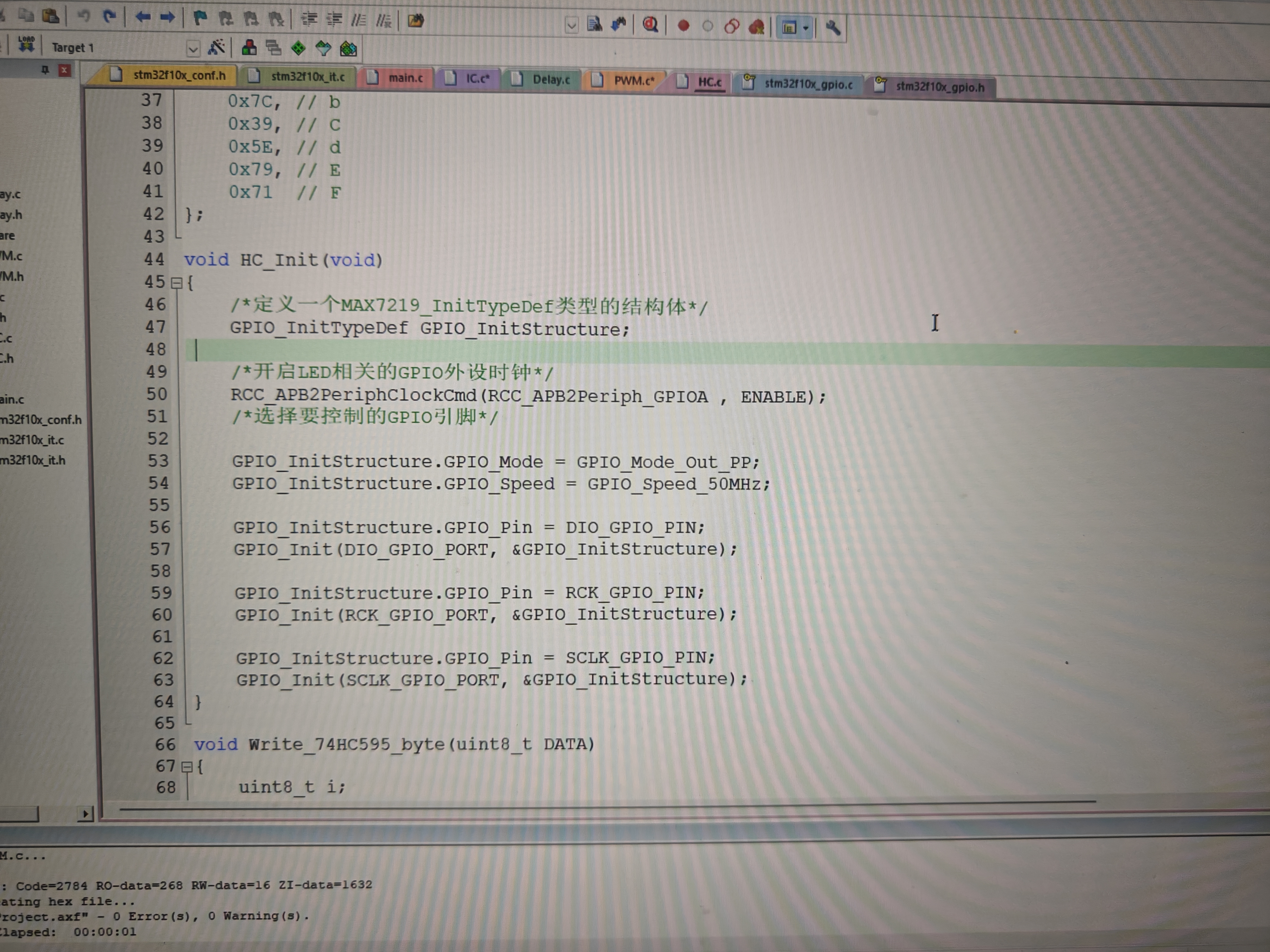
此图为hc595宏定义

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
在使用 Proteus 进行 STM32 与 HC595(串行移位寄存器)的仿真时,如果发现 STM32 引脚无电平,可能是由于以下几个原因导致的。以下是详细分析和解决方案:
STM32 引脚配置错误
代码逻辑问题
HAL_GPIO_WritePin() 或未初始化定时器/PWM。Proteus 仿真设置不正确
HC595 驱动能力不足
信号传输路径中断
确保 PA0 设置为输出模式:
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
确保 PA6 设置为输入模式:
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
重点: 正确的引脚模式是确保电平输出的基础。
TIM_HandleTypeDef htim2;
void MX_TIM2_PWM_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8399; // 1MHz / (8400) = 100Hz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999; // 100Hz * 1000 = 100kHz
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
}
重点: 定时器配置错误会导致无法输出波形,进而导致引脚无电平。
重点: HC595 自身驱动能力较弱,不能直接驱动数码管。
重点: Proteus 仿真环境中的连接错误可能导致逻辑上看似通电,但实际上无电平。
printf 或 HAL_GPIO_ReadPin() 判断引脚状态,确认是否被正确控制。如果你使用的是 TIM2 生成 PWM 波形 并通过 HC595 控制数码管,可以参考以下修改后的代码片段:
// 初始化 PWM
void PWM_Init(void)
{
__HAL_RCC_TIM2_CLK_ENABLE();
TIM_HandleTypeDef htim2;
TIM_OC_InitTypeDef sConfigOC;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8399; // 1MHz / 8400 = 100Hz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999; // 100Hz * 1000 = 100kHz
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1) != HAL_OK)
Error_Handler();
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 占空比 50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1);
}
// 主函数中调用
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
PWM_Init();
while (1)
{
// 主循环
}
}
重点: 正确的 PWM 配置和初始化是确保引脚有电平的关键。
| 问题点 | 解决方案 |
|--------|----------|
| 引脚模式错误 | 设置为 GPIO_MODE_OUTPUT_PP 或 GPIO_MODE_INPUT |
| 定时器配置错误 | 正确配置 PWM 参数(Prescaler, Period, OCMode) |
| HC595 驱动不足 | 加装三极管或 MOSFET 驱动数码管 |
| Proteus 连接错误 | 检查电源、地线及信号线连接 |
| 代码逻辑错误 | 添加调试语句,查看引脚状态 |
如有更多具体代码或电路图,可进一步分析,我会帮助你定位问题。希望以上内容对你有所帮助!
分享 修改了问题
1月2日
修改了问题
1月2日
创建了问题
1月2日
修改了问题
1月2日
修改了问题
1月2日
创建了问题
1月2日


